Классификация кинематических пар по числу степеней свободы и числу связей
Поскольку условий связи может быть от одного до пяти, то и число классов пар равно пяти, в соответствии с чем мы имеем кинематические пары I, II, III, IV и V классов. Итак, число условий связи S, наложенных на относительное движение каждого звена кинематической пары, может располагаться в пределах от 1 до 5, т. е. Все кинематические пары делятся на классы в зависимости от числа условий связи… Читать ещё >
Классификация кинематических пар по числу степеней свободы и числу связей (реферат, курсовая, диплом, контрольная)
Числом степеней свободы механической системы называется число независимых возможных перемещений системы.
Пока звенья не соединены в кинематическую пару, то каждое звено имеет шесть степеней свободы: три возможных поступательных перемещения вдоль трех неподвижных координатных осей X, Y, Z и три вращательных движения вокруг этих осей.
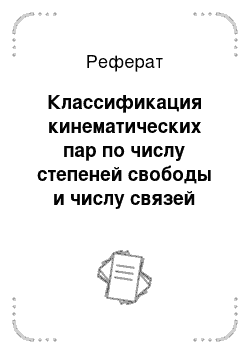
Соединение двух звеньев в кинематическую пару приводит к тому, что при движении относительно друг друга звенья не имеют возможности осуществлять все движения свободного тела, т. е. теряют некоторые из степеней свободы. Это объясняется тем, что в каждой контактной точке звеньев вектор относительной скорости v0T направлен по общей касательной т—т соприкасающимся поверхностям (рис. 4.3, а) в тоже время относительное движение вдоль общей нормали п—п невозможно, так как в противном случае нарушается вид контакта (звенья или вдавливаются или отходят друг от друга).
Ограничения, наложенные на относительное движение звеньев, называют связями. Комбинация связей во всех контактных точках, зависящая от конструктивной формы элементов кинематической пары, приводит к тому или иному виду относительного движения. Например: в сферической паре звено 2 (рис. 4.3, б) относительно 1 имеет три возможных независимых вращательных движения вокруг осей X, Y, Z. На три поступательных движения вдоль этих осей наложены связи.
Итак, число условий связи S, наложенных на относительное движение каждого звена кинематической пары, может располагаться в пределах от 1 до 5, т. е. 

Рис. 4.3. Кинематическая пара:
а — условие контакта двух звеньев; б — относительное движение звеньев в кинематической паре Следовательно, число степеней свободы Н звена кинематической пары в относительном движении звеньев:

где S — число условий связей, налагаемое элементами кинематической пары на относительное движение звеньев.
Если S = 6, то два звена жестко связаны, в этом случае кинематическая пара отсутствует. Если S = 0, то два звена свободны друг от друга, т. е. здесь тоже нет кинематической пары.
В примере сферической кинематической пары (см. рис. 4.3, б) S = 3 иЯ = 6- 3 = 3.
Оставшиеся возможные движения звеньев могут быть или независимыми или зависимыми друг от друга. Например, в кинематической паре винта и гайки (винтовой паре) независимое вращение винта вокруг оси вызывает его поступательное (зависимое) движение вдоль этой оси.
Все кинематические пары делятся на классы в зависимости от числа условий связи, налагаемых ими на относительное движение их звеньев.
Поскольку условий связи может быть от одного до пяти, то и число классов пар равно пяти, в соответствии с чем мы имеем кинематические пары I, II, III, IV и V классов.
К первому классу относятся пары с S = 1. Ко второму классу относятся пары с S = 2 и т. д. Стрелками показаны возможные независимые движения одного звена относительно другого.