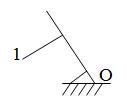
Механизм качающегося конвейера
В масштабе строится схема механизма, определяются положения центра тяжести звеньев 2, 3, 4 и строятся траектории центра тяжести звеньев. Значения длин звеньев на чертеже будут следующими: Строится следующая группа Асура 2-го класса, состоящая из звеньев 2 и 3 и на соответствующие точки приложены вектора всех сил. В точке «В» вектор силы реакции, но по значению равны. Определяется уравновешивающая… Читать ещё >
Механизм качающегося конвейера (реферат, курсовая, диплом, контрольная)
- 1. Длины звеньев и геометрические параметры:
- · lOA =0,19 m
- · lAB = 0,31 m
- · lBC = 1,5 m
- · lDB = 0,28 m
- · X = 0,33 m
- · Y = 0,06 m
- 2. Число оборотов электродвигаля n = 1350 ob/min
- 3. Число оборотов кривошипа n1 = 70 ob/min
- 4. Массы звеньев:
m2 = 21 kg.
m3 = 25 kg.
m4 = 85 kg.
m5 = 250kg.
mm = 950 kg.
5. Моменты инерции :
J01 = Ls3 = 1,1 kgm2.
Js2 = 0,5 kgm2.
Js4 = 36 kgm2.
Jdv = 0,03 kgm2.
6. Сила сопротивления на ползуне:
Рлев = 1б5 кн Рправ = 4б0 кн Структурный анализ механизма.
Степень подвижности определяется по формуле П. Л. Чебышева:
где: nчисло подвижных звеньев, Р5 — кинематические пары 5- класса;
Р4 — кинематические пары 4-класса.
Разделение на группы Асура необходимо начать с последнего группы.
Кинематический анализ механизма Целью кинематического анализа является определение траекторий движения центра масс звеньев и изменений кинематических параметров в зависимости от положений звеньев механизма.
Для кинематического анализа даны следующие параметры:
- · lOA =0,19 m
- · lAB = 0,31 m
- · lBC = 1,5 m
- · lDB = 0,28 m
- · X = 0,33 m
- · Y = 0,06 m
- · n = 70 obmin
В масштабе строится схема механизма, определяются положения центра тяжести звеньев 2, 3, 4 и строятся траектории центра тяжести звеньев. Значения длин звеньев на чертеже будут следующими:
Векторное уравнение скорости точки «А» кривошипа выглядит следующим образом:
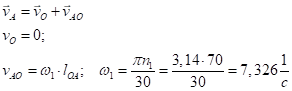

Вектор скорости этой точки направлен перпендикулярно первому положению кривошипа.. Приняв длину этого вектора, определяется масштаб скорости:


Векторное уравнение скорости точки «В»:

Вектор скорости направлен перпендикулярно положению звена АВ, т. е.
Векторное уравнение скорости точки D выглядит следующим образом:

Построив план скоростей для первого положения кривошипа, определяется положение центра тяжести звеньев на плане скоростей:

Значения скоростей для других положений звеньев приведены в таблице 1.
Таблица 1.
4). | |||||||||
VA. | 0,879. | 0,879. | 0,879. | 0,879. | 0,879. | 0,879. | 0,879. | 0,879. | 0,879. |
VB. | 0,676. | 0,888. | 0,976. | 0,705. | 0,619. | 1,88. | 0,802. | ||
VD. | 0,418. | 0,698. | 0,912. | 0,705. | 0,628. | 1,637. | 0,486. | ||
VS2. | 0,614. | 0,798. | 0,926. | 0,785. | 0,439. | 0,383. | 1,207. | 0,848. | 0,438. |
VS3. | 0,338. | 0,444. | 0,488. | 0,352. | 0,309. | 0,818. | 0,401. | ||
VS4. | 0,513. | 0,757. | 0,949. | 0,705. | 0,623. | 1,73. | 0,612. | ||
VBA. | 0,972. | 0,763. | 0,35. | 0,214. | 0,879. | 1,33. | 1,67. | 0,11. | 0,879. |
VDB. | 0,46. | 0,436. | 0,255. | 0,038. | 0,608. | 0,523. | |||
щ1. | 7,326. | 7,326. | 7,326. | 7,326. | 7,326. | 7,326. | 7,326. | 7,326. | 7,326. |
щ2. | 2,11. | 1,658. | 0,76. | 0,465. | 1,91. | 2,89. | 3,63. | 0,237. | 1,91. |
щ3. | 1,73. | 2,276. | 2,5. | 1,807. | 1,587. | 4,82. | 2,058. | ||
щ4. | 0,306. | 0,29. | 0,17. | 0,025. | 0,405. | 0,348. |
Построение планов ускорений Векторное уравнение ускорения точки «А» выглядит следующим образом:
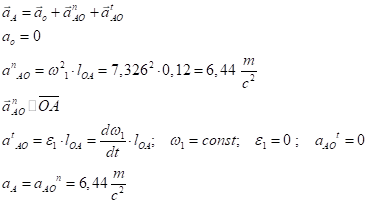
Масштаб ускорений:

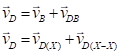
Векторное уравнение ускорения точки «В» выглядит следующим образом:
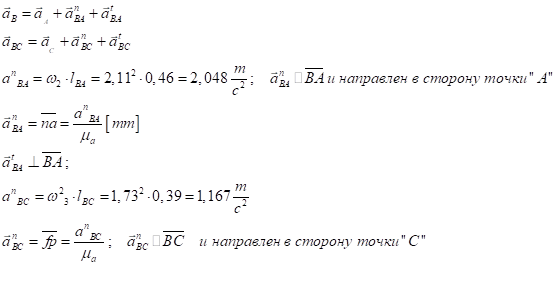
Векторное уравнение точки «D», принадлежащего шатуну и ползуну, выглядит следующим образом:
Положения центров тяжести звеньев определяются как на плана скоростей.
Абсолютные и относительные ускорения в точках «В» и «D» а также угловые ускорения звеньев механизма определены следующим образом:
Значении ускорений для других положений звеньев преведены в таблице 2.
Таблица 2.
anAO. | 6,44. | 6,44. | 6,44. | 6,44. | 6,44. | 6,44. | 6,44. | 6,44. |
aB. | 4,2. | 3,31. | 2,39. | 6,71. | 17,69. | 9,68. | 9,84. | 5,78. |
aD. | 3,4. | 3,26. | 0,88. | 6,26. | 17,67. | 7,9. | 7,53. | 3,38. |
aS2. | 5,28. | 4,86. | 4,27. | 5,4. | 11,72. | 3,3. | 5,72. | 5,83. |
aS3. | 2,1. | 1,65. | 1,19. | 3,35. | 8,84. | 4,84. | 4,92. | 2,88. |
aS4. | 3,74. | 3,27. | 1,31. | 6,46. | 17,68. | 7,92. | 8,4. | 4,26. |
anBA. | 2,04. | 1,26. | 0,265. | 0,1. | 3,84. | 6,06. | 0,026. | 1,68. |
atBA. | 1,0. | 2,85. | 4,65. | 7,64. | 12,0. | 13,75. | 12,2. | 3,4. |
anBC. | 1,16. | 2,02. | 2,43. | 1,27. | 0,982. | 9,06. | 1,65. | |
atBC. | 4,04. | 2,64. | 0,31. | 6,63. | 17,67. | 3,35. | 9,82. | 5,88. |
anDB. | 0,14. | 0,126. | 0,043. | 0,0009. | 0,246. | 0,18. | ||
atDB. | 1,73. | 1,68. | 2,5. | 1,3. | 0,11. | 0,03. | 5,0. | 4,17. |
е2. | 2,17. | 6,19. | 9,67. | 16,6. | 26,0. | 29,89. | 26,52. | 7,39. |
е3. | 10,3. | 6,77. | 0,79. | 45,3. | 8,59. | 25,18. | ||
е4. | 1,15. | 1,12. | 1,67. | 0,86. | 0,07. | 0,07. | 3,34. | 2,78. |
Кинетостатический анализ механизма Целью кинетостатического анализа является определение сил реакций в кинематических парах с учётом сил инерций, а также определение уравновешивающей силы Для силового анализа даны следующие параметры.
· Массы звеньев:
m2 = 21 kg; m3 = 25 kg; m4 = 85 kg; m5 = 250 kg.
· Моменты инерции:
J01 = Ls3 = 1,1 kgm2; Js2 = 0,5 kgm2; Js4 = 36 kgm2; Jdv = 0,03 kgm2.
· Сила сопротивления:
Рчап =1б5Кн Рўнг = 6,0 Кн Силы реакций в кинематических парах определяются для каждой группы Асура. Разделение на группы Асура необходимо начать с последней группы.
Силы инерции звеньев приложены к центру тяжести звеньев, а вектора этих сил направлены противоположно векторам абсолютных ускорений центра тяжести звеньев.
В точке «В» звена 4 действует сила реакции R (23)4. Для удобства расчётов эту силу распределим на нормальную Rn (23)4 и тангециальную Rt (23)4. Для определения последней составляется уравнение равновесия моментов от всех сил по отношению к точке «D».
качающийся конвейер движение звено.


Результат получился отрицательный. Это означает, что в действительности вектор направлен в противоположную сторону.
Силы реакций Rn (23)4 и R05 определяются с плана сил.
План сил строится на основе следующего векторного уравнения моментов:

Для построения плана сил необходимо выбрать масштаб сил и на основе этого определить длины векторов известных сил.
Rt (23)4 = 559,48 H;
G4 = 833,85 H.
Pи4 = 271,95 Н Р? = 4600 Н.

G5 = 4905 Н Ри5 = 1630 Н Для определения длин векторов известных сил необходимо их истинные значения разделить на масштаб сил. В результате получены следующие значения:
С плана сил определяются истинные значения неизвестных сил:
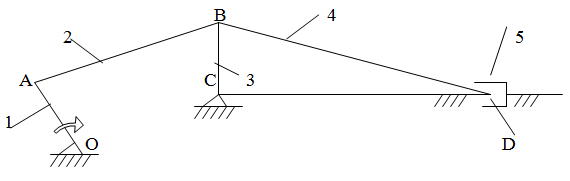
Для определения силы реакции между 4 и 5 звеньями строится векторное уравнение равновесия от всех сил 4-го или 5-го звена.
Для 4-го звена:
Длины векторов известных сил следующие:

Строится план сил и определяется значение силы реакции между 4 и 5 звеньями?

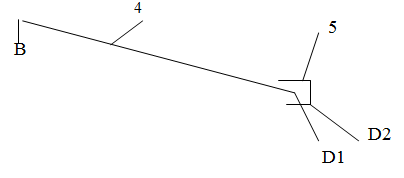
Определение неизвестных сил звеньев 2 и 3.
Строится следующая группа Асура 2-го класса, состоящая из звеньев 2 и 3 и на соответствующие точки приложены вектора всех сил. В точке «В» вектор силы реакции, но по значению равны.
Определяются сиы инерций и моменты от этих сил:
Для определения силы реакции в точке «А» составляется уравнение равновесии моментов от всех сил звена 2 по отношению к точке «В».
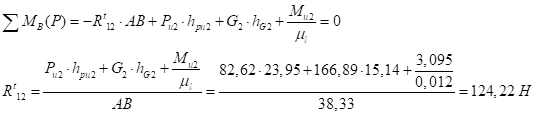
Для определения силы реакции в точке «С» составляется уравнение равновесии моментов от всех сил звена 3 по отношению к точке «В».
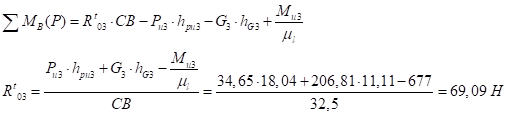
Другие силы определяются с плана сил.
Векторное уравнение равновесия для данной группы Асура выглядит следующим образом:

По максимальному значению известных сил выбирается масштаб и определяются длины векторов.

По полученным значениям длин векторов с плана сил определяются истинные значения неизвестных сил.

Определяется уравновешивающая сила от всех сил звеньев механизма. В точке «А» кривошипа приложены вектор уравновешивающей силы Рур и вектор силы реакции от 2 и 3 звеньев.
Уравновешивающая сила определяется из уравнения момента от сил на звене 1.


Сила реакции ROA определяется с плана сил.
Векторное уравнение равновесия выглядит следующим образом:
Рпр = 2444,37 Н; R21 = 2748,41 H.
Определение уравновешивающей силы при помощи жёсткого рычага Н. Е. Жуковского.
Для этого строится план скоростей для 1-го положения механизма и в соответствующие точки прикладываются вектора от всех внешних сил (силы реакций в этом случае не учитываются). Уравновешивающая сила определяется из уравнения равновесия моментов от всех сил по отношению к полюсу скоростей.

Относительная ошибка.

Проектирование зубчатой передачи Для расчёта внешнего зубчатого зацепления даны следующие параметры:
Z1 = 17; Z2 = 39; m = 10 mm.
Расчёт параметров ведётся в следующей последовательности:
Радиусы делительных окружностей:
r1 = m Z12 = (10*13)2 = 65 mm.
r2 = m Z22 = (10*39)2 = 195 mm.
Радиусы основных окружностей:
rb1 = (mZ12)*cos б0 = 61,08 mm.
rb2 = (mZ22)*cos б0 = 183,24 mm.
Межосевое растояние:
aw = [m (Z1+Z2)]2 * = 262,43 mm.
Радиусы окружностей впадин зубьев:
rf1 = m (Z12+X1-h*a-C*) = 10(13/2+0,51−1-0,25) = 57,6 mm.
rf2 = m (Z22+X2-h*a-C*) = 10(39/2−0,27−1-0,25) = 179,8 mm.
Радиусы вершин зубьев:
ra1 = aw-rf2- (C*)*m = 262,43−179,8-(0,25*10) =80,13 mm.
ra2 = aw-rf1- (C*)*m = 262,43−57,6-(0,25*10) = 202,33 mm.
Высота зубьев:
h1 = ra1- rf1 = 80,13−57,6 =22,53 mm.
h2 = ra2- rf2 = 202,33−179,8 =22,53 mm.
Толщина зуба по делительной окружности:
S1 = (рm2) = (3,14*10)2 = 19,4 mm.
Шаг зубьев по делительной окружности:
P = рm = 3,14*10 = 31,4 mm.
Шаг зубьев по основной окружности:
P0 = рm*cos б0 =31,4*0,94 = 29,5 mm.
Коэффициент перекрытия:
Проектирование планетарной передачи Вращательное движение от электродвигателя передаётся через пару зубчатых колёс на планетарный механизм и далее к кривошипу.
Общее передаточное отношение между валом электродвигателя и кривошипом Uоб выражается следующей формулой:
где: U12 — передаточное число открытой зубчатой передачи;
Uпл — передаточное число планетарной передачи;
Передаточное число планетарной передачи определяется следующей формулой:
Данный планетарный механизм состоит из пары внешней и пары внутренней передачи. Числа зубьев должны удовлетворять следующим условиям:
Принимается Z1 = 20. Тогда:
Из условия соосности имеем:
Z1 + 2Z2 = Z3.
Определятся Z2:
Уточняется передаточное число планетарной передачи:
Найденные числа зубьев проверяются на условие соседства:

где: К — число сателлитов; Р — полное число оборотов водилы; В — любое целое число.
Проверяем числа зубьев на условие сборки:
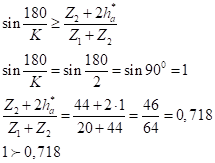
Условие сборки удовлетворяет.
Окончательно принимаем Z1 = 20; Z2 = 44; Z3 = 108.
Определяются значения делительных радиусов:
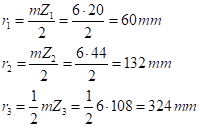
Для построения планетарного механизма выбирается масштаб длин:
Значения радиусов на чертеже:
Проектирование кулачкового механизма Для проектирования даны следующие параметры:
- 1. Длина коромысла lк = 105 mm
- 2. Максимальный угол отклонения коромысла в = 250
- 3. Фазовые углы
- 4. Фазы подъёма и опускания цп = цо =700
- 5. Угол дальнего стояния цдс = 100
- 6. Угол давления браз =450
Закон изменения движения толкателя дан в виде графика.
Фазовые углы кулачка распределены следующим образом:

Масштаб рабочей фазы кулачка:
— в градусах:
— в радианах:


Строится график аналога ускорений. Максимальная амплитуда по оси ординат равна 70 мм. По оси абсцисс отложены чертёжные значения фазы рабочего угла, т. е.. Из полученной диаграммы аналога ускорений путём графического интегрирования получаем график аналога скоростей. Расстояние ОН2 = 1 рад., соответствующее 57,3 градусам.
Ещё раз проинтегрировав диаграмму аналога скоростей, получен график движения толкателя. Для того, чтобы значения ординат графиков аналога скорости и движения толкателя получились в одинаковом масштабе, расстояние ОН1 определяется путём вычислений:
Масштаб движения коромысла:
— в градусах:
— в радианах:

Масштаб линейного пути наконечника толкателя:

Масштаб аналога угловой скорости коромысла:

Масштаб аналога линейного пути движения наконечника толкателя:
Масштаб аналога углового ускорения коромысла:
Определение минимального радиуса кулачка.

Для определения минимального радиуса кулачка строится номограмма путём исключения параметра ц с диаграмм и .

Вычисляется чертёжное значение длины коромысла, этим отрезком проводится дуга О1 В, затем с точки О1 проводится угол в = 250 и этим градусом ограничивается дуга. Для определения на отрезке дуги значений ординат с графиrа, проводится произвольный отрезок О1D = 130 мм и с конечной точки проводится перпендикуляр до пересечения с линией, проведённой под углом 250. Пересечение двух линий отмечается точкой К. На перпендикуляре отложим отрезки DК1, DК2, DК3 и т. д., соответствующие тангенсам углов качания коромысла tgвi и определяемые по диаграмме .
DКi = O1D tgвi;


Соединив полученные точки с точкой О1, на пересечении с дугой получим истинные точки ординат с графика. С полученных точек отложены значения ординат с диаграммы. Соединив полученные точки плавной кривой, получится номограмм. С левой и правой сторон кривой проводятся касательные под углом, отмечается точка пересечения и на 3−4 мм ниже этой точки отмечается ось минимального радиуса кулачка. Значение этого радиуса на чертеже равно. Значение радиуса ролика на наконечнике коромысла равно .
