Обсуждение структур регуляторов и методов их расчета
В ряде случаев не удается качественно измерить стабилизируемую величину в широком диапазоне частот: широкополосные датчики характеризуются большим смещением или дрейфом, а датчики с малым смещением формируют сигнал более зашумленный. Так, например, обстоят дела в возимом стандарте частоты. Применение ПЛ-регуляторов (на основе принципа локализации) позволяет совместить достоинства и исключить… Читать ещё >
Обсуждение структур регуляторов и методов их расчета (реферат, курсовая, диплом, контрольная)
Совмещение достоинств разных датчиков
Зачастую измерение сигнала в широкой полосе характеризуется большим сдвигом средней величины, а методы прецизионных измерений требуют длительного осреднения для ослабления влияния шумов. Регуляторы на основе принципа локализации (ПЛ-регуляторы) позволяют совместить достоинства малошумящих (но нестабильных) датчиков и стабильных (но зашумленных) датчиков.
В ряде случаев не удается качественно измерить стабилизируемую величину в широком диапазоне частот: широкополосные датчики характеризуются большим смещением или дрейфом, а датчики с малым смещением формируют сигнал более зашумленный. Так, например, обстоят дела в возимом стандарте частоты [1]. Применение ПЛ-регуляторов (на основе принципа локализации) [2] позволяет совместить достоинства и исключить недостатки таких датчиков, т. е. создать систему с малым смещением и с малым уровнем шумов, хотя ни один из датчиков не дает одновременно сигнала с указанным качеством.
Рассмотрим для примера объект второго порядка с запаздыванием по уравнению: 
Пусть первый датчик имеет смещение на величину, А = 0,3, а второй датчик имеет на входе гауссов шум со среднеквадратическим значением, а = 1. Уравнение ПЛ-регулятора для этого случая предлагается в следующем виде (оптимизация коэффициентов осуществлена моделированием):

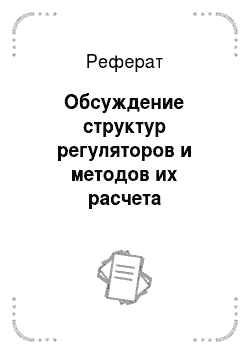
Здесь Zj — выход первого датчика, Z2 — выход второго датчика, U — управление, V — задание. Результаты моделирования системы в среде VisSim приведены на рис. 5.1.
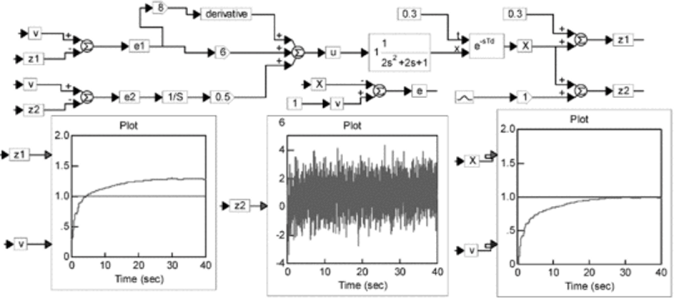
Рис. 5.1. Схема модели в программе VisSim 5.0.
Выходные сигналы датчиков показаны на левом и среднем графике, значение стабилизируемой величины (не доступной для измерения) — на правом графике. Видно, что, хотя оба датчика далеко не идеальны, переходный процесс свободен от смещения, характерного для первого датчика, и почти не имеет шумов, характерных для второго датчика.
Для наглядности приведем результаты регулирования с применением только одного датчика.
- 1. Результат с малошумящим датчиком, имеющим большое смещение. Если применить только м&пошумящий датчик (но имеющий смещение), то моделирование дает переходные процессы, показанные на рис. 5.2. Видно, что установившееся значение управляемой величины не совпадает с предписанным значением (правый график не стремится к единичному значению).
- 2. Результат с датчиком, имеющим малое смещение, но большие шумы. Если применить только датчик с малым смещением (но имеющий высокочастотные шумы), то получим переходные процессы, показанные на рис. 5.3. Видно, что в этом случае установившееся значение соответствует в среднем предписанному значению V, но выходной сигнал сильно зашумлен.
- 3. Результат объединения датчиков показан ранее на рис. 5.1.
Следовательно, продемонстрирована целесообразность сочетания нескольких датчиков одной и той же величины в единой системе автоматического управления в том случае, если шумовые свойства датчиков различны в различных частотных диапазонах, в частности, если один датчик характеризуется малыми высокочастотными шумами, но большим смещением среднего, а другой, наоборот, малым смещением среднего, но большими высокочастотными шумами.
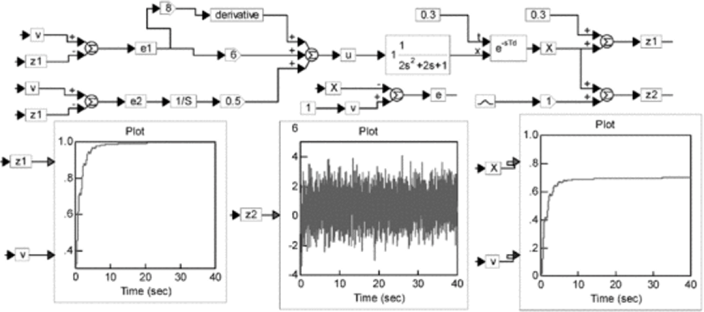
Рис. 5.2. Система с применением только малошумяицего датчика для управления (выход Z).

Рис. 5.3. Система с применением только датчика с малым смещением для управления (выход Z2).
Для описания частотных свойств датчика или системы автоматического управления целесообразно использовать двухвыборочную дисперсию шума <�г (т) на интервале времени т или стандартное отклонение о (т) [3]. Характеристика о (т) носит название функции Аллена и определена как среднеквадратичное приращение среднего значения величины, измеренной на двух интервалах длительностью т, следующих строго один за другим.
Вычислитель этой величины также можно смоделировать в ПО VisSim, как показано на рис. 5.4. Вычислитель работает по принципу накопления статистических данных и позволяет объективно сравнить шумовые свойства различных систем или генераторов шумов по частотным диапазонам. Для получения результата в пределах 5%-й погрешности необходимо усреднить не менее сотни приращений средней величины.

Рис. 5.4. Структура вычислителя функции Аллена (блок ALLANOMETER).
Применение этого вычислителя позволило продемонстрировать эффективность такого подхода применительно к задаче стабилизации частоты излучения лазера, входящего в систему трехступенчатого гетеродинного лазерного спектрометра сверхтонкой структуры поглощения метана и лазерного телескопического возимого стандарта частоты на его основе [1]. Целесообразно вставить соответствующую иллюстрацию.
Рассмотренный подход является дополняющим методом к ранее известному методу совмещения достоинств двух приводов (модуляторов) для управления одной величиной. В этом известном случае с помощью разделения движений удается, используя широкополосный модулятор с малым ресурсом управления и узкополосный модулятор с большим ресурсом управления, обеспечить управление в широкой полосе и с большим ресурсов одновременно. Этот метод соединения достоинств и взаимной компенсации недостатков двух модуляторов при его применении к датчикам впервые позволил показать возможность соединения достоинств двух датчиков и взаимной компенсации их недостатков. А именно: применяя датчик с малым шумом, но большим дрейфом, совместно с датчиком, имеющим малый дрейф, но большой шум, можно обеспечить управление, соответствующее результату, который получается при использовании датчика с малым шумом и малым дрейфом.
Отметим, что оба эти принципа могут быть одновременно использованы в том случае, если указанные проблемы возникают как в отношении датчиков, так и в отношении модуляторов. При этом будет сформирована система, измеряющая один выходной сигнал с помощью двух независимых датчиков, и управляющая объектом с помощью двух модуляторов. Но, несмотря на то, что регулятор при этом будет иметь два входа и два выхода, такая система не будет многоканальной, поскольку управление будет осуществляться только в отношении единственной выходной величины.