Робастные регуляторы.
Теория автоматического управления.
Замкнутые системы
Параметры объекта могут изменяться и в более широком диапазоне. Так, на рис. 2.8 показаны процессы с тем же регулятором при изменении постоянной времени от 20 до 70 с. Система остается устойчивой, перерегулирование не превышает в худшем случае 10%. Для ряда технических задач такая система может быть признана удовлетворительной. Если параметры объекта известны недостаточно точно или изменяются… Читать ещё >
Робастные регуляторы. Теория автоматического управления. Замкнутые системы (реферат, курсовая, диплом, контрольная)
Если параметры объекта известны недостаточно точно или изменяются неконтролируемо, но остаются в известном интервале, может быть поставлена задача проектирования такого регулятора, который обеспечит приемлемое управление объектом для всех сочетаний параметров объекта, которые лежат в пределах допустимых значений.
Эта задача может оказаться неразрешимой. Даже если найден регулятор, обеспечивающий устойчивое управление при крайних значениях параметров объекта, может оказаться, что некоторое неблагоприятное сочетание параметров объекта с указанным регулятором нарушит устойчивость системы.
В целом сочетание обозначения параметров объекта терминами «благоприятное» или «неблагоприятное» имеет право на существование, если понимать под благоприятным такое сочетание, которое позволяет достичь более высокой точности при большем быстродействии. Неблагоприятным сочетанием тогда назовем такое сочетание, которое заставляет жертвовать быстродействием и (или) точностью ради устойчивости системы. Если же для системы спроектирован робастный регулятор, то благоприятное сочетание параметров может с такой же вероятностью нарушить устойчивость, как и неблагоприятное, поскольку «благоприятность» сочетания параметров в этом случае следует соотносить не с потенциально достижимым быстродействием и точностью, а с качествами системы при заданном фиксированном регуляторе.
Робастные регуляторы никогда не могут быть оптимальными, так же, как оптимальные регуляторы (для фиксированных параметров объекта) не могут быть робастными.
Метод численной оптимизации регуляторов для ансамбля объектов с групповым критерием качества может позволить рассчитать робастный регулятор, о чем будет сказано ниже.
Пример 2.4. Рассмотрим модели объекта:

Пусть известно, что постоянная времени звена запаздывания т изменяется в пределах от 50 до 60 с.
Пусть в системе используется ПИД-регулятор (2.2) со следующими коэффициентами: Кп = 0,562; Ки = 0,0087; Ка = 2,78. На рис. 2.7 показаны переходные процессы при разных значениях постоянной времени: Tj = 50 с, т2 = 55 с, т3 = 60 с.
Параметры объекта могут изменяться и в более широком диапазоне. Так, на рис. 2.8 показаны процессы с тем же регулятором при изменении постоянной времени от 20 до 70 с. Система остается устойчивой, перерегулирование не превышает в худшем случае 10%. Для ряда технических задач такая система может быть признана удовлетворительной.
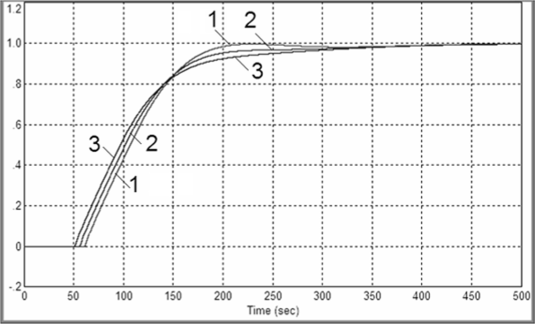
Рис. 2.7. Отклик системы с объектом (2.10) и ПИД-регулятором на единичное ступенчатое воздействие:
линия 1 — т3 = 60 с; линия 2 — т2 = 55 с; линия 3 — Tj = 50 с.
Вывод 2.5. По меньшей мере в некоторых случаях можно рассчитать такой регулятор, с которым система будет оставаться работоспособной при существенном изменении каких-либо параметром модели объекта.
Пример 2.5. Для иллюстрации утверждения о том, что робастный регулятор не оптимален, рассчитаем оптимальный регулятор для модели объекта (2.10) при значении т0 = 20 с. Полученные коэффициенты равны Kp, = 1,9; КИ = 0,0297; Кд = 12,86. Полученный переходный процесс показан на рис. 2.9 линией 1. Зададим новое значение постоянной времени tj = 30 с. Полученный график показан на рис. 2.9 синей линией. В первом случае переходный процесс отличается высоким качеством: длительность процесса мала, не более 100 с, перерегулирование пренебрежимо мало, не более 2%. Во втором случае перерегулирование возрастает почти до 40%, длительность становится более 250 с. Если еще увеличить постоянную времени, например до значения т2 = 40 с, то переходный процесс в системе ухудшится еще сильнее. Соответствующий график показан на рис. 2.10, перерегулирование составляет около 70%.
Пример 2.6. Далее рассчитаем оптимальный регулятор для объекта с постоянной времени т2 = 40 с. Полученные коэффициенты равны Кп = 1,05; КИ — 0,0152; Кд = 12,45. Переходный процесс показан на рис. 2.11 линией 2. Он также весьма привлекателен: перерегулирование — не более 2%, длительность — около 150 с. Вернем значение постоянной времени т0 = 20 с. Полученный процесс показан на рис. 2.11 линией 1. Он не столь привлекателен, так как длительность составляет около 250 с. Достаточно сравнить этот процесс с процессом, показанным линией 1 на рис. 2.9, чтобы увидеть, насколько он хуже.
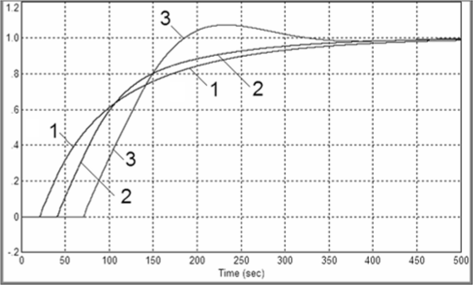
Рис. 2.8. Отклик системы с объектом (2.10) и ПИД-регулятором на единичное ступенчатое воздействие:
линия 1 — т2 = 20 с; линия 2 — = 40 с; линия 3 — т3 = 70 с.
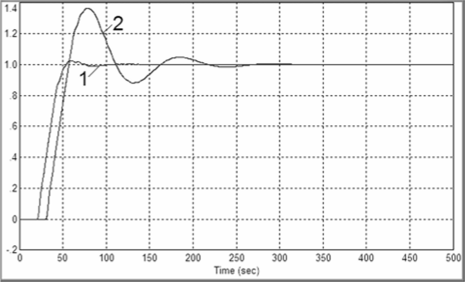
Рис. 2.9. Отклик системы с объектом (2.10) и ПИД-регулятором по примеру 2.5 на единичное ступенчатое воздействие:
линия 1 — т0 = 20 с; линия 2 — т2 = 30 с.
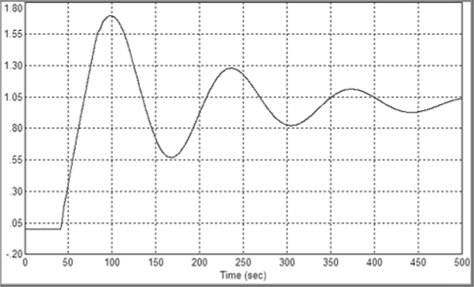
Рис. 2.10. Отклик системы с объектом (2.10) и ПИД-регулятором по примеру 2.5 на единичное ступенчатое воздействие при т3 = 40 с.
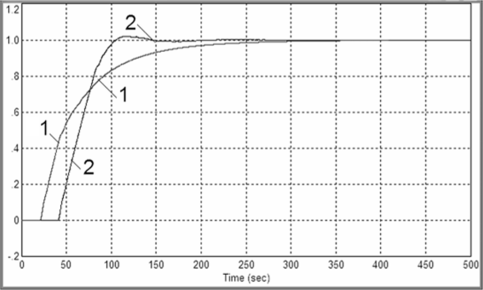
Рис. 2.11. Отклик системы с объектом (2.10) и ПИД-регулятором по примеру 2.6 на единичное ступенчатое воздействие:
линия 1 — т0 = 20 с; линия 2 — т2 = 30 с.
Вывод 2.6. Робастные регуляторы не оптимальны.
Вывод 2.7. Оптимальные регуляторы не робастны.
Формулировка задачи проектирования адаптивной системы.
Дано:
- 1) известна модель объекта либо она может быть определена в результате цикла испытаний. Известно также, что в этой модели по меньшей мере один из коэффициентов изменяется в некотором ограниченном интервале, скорость изменения ограничена снизу;
- 2) имеются требования к замкнутой системе.
Требуется: спроектировать регулятор, такой, чтобы система отвечала требованиям по п. 2 в условиях по п. 1.
Методы решения. Параметры регулятора не могут изменяться в ходе работы системы.