Связи и узлы пространственных расчетных схем
Линейно-подвижная связь с двумя поворотами (рис. 1.10, д), представляющая собой три стержня в одной плоскости, из которых два параллельны, а третий имеет с одним из них общий шаровой шарнир. Кинематическая характеристика: связь препятствует взаимным поступательным перемещениям соединяемых тел Т, и Т2 и повороту в плоскости стержней (xOz), но допускает поступательное перемещение по прямой… Читать ещё >
Связи и узлы пространственных расчетных схем (реферат, курсовая, диплом, контрольная)
Различают семь видов наиболее часто встречающихся связей пространственных систем.
1. Шаровой шарнир, конструктивная и расчетная схемы которого показаны соответственно на рис. 1.9, а и б. Кинематическая характеристика: связь препятствует поступательным перемещениям соединяемых тел Tj и Т2 относительно друг друга в трех взаимно перпендикулярных направлениях и допускает взаимный поворот в любых направлениях; уничтожает три степени свободы соединяемых тел.
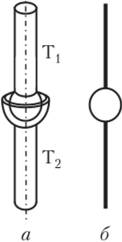
Рис. 1.9.
2. Простая линейная или плоскоподвижная шаровая связь (рис. 1.10, а), представляющая собой стержень с шаровыми шарнирами по концам. Кинематическая характеристика: связь препятствует взаимному поступательному перемещению соединяемых тел Т, и Т2 по направлению оси связи (вдоль оси z), но допускает поступательные перемещения в двух плоскостях, перпендикулярных к оси стержня, и повороты вокруг трех взаимно перпендикулярных осей; уничтожает одну степень свободы соединяемых тел.
Данная связь является основой образования большинства приведенных ниже видов связей. Связи остальных видов являются различными комбинациями нескольких простых линейных связей.
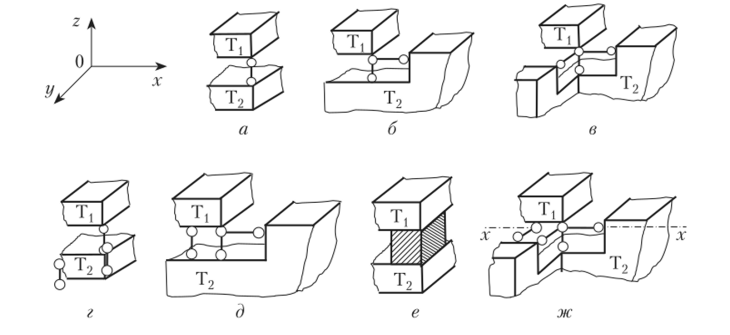
Рис. 1.10.
- 3. Линейно-подвижная шаровая связь (рис. 1.10, 6), представляющая собой два стержня с общим шаровым шарниром. Кинематическая характеристика: связь препятствует взаимным поступательным перемещениям соединяемых тел Tt и Т2 в плоскости двух стержней, но допускает поступательное перемещение в направлении, перпендикулярном этой плоскости, и повороты вокруг трех взаимно перпендикулярных осей; уничтожает две степени свободы соединяемых тел.
- 4. Неподвижная шаровая связь (рис. 1.10, в), представляющая собой три стержня, не лежащих в одной плоскости и имеющих общий шаровой шарнир. Кинематическая характеристика: связь препятствует взаимным поступательным перемещениям соединяемых тел Т, и Т2 относительно друг друга в трех взаимно перпендикулярных направлениях. Допускает взаимный поворот в любых направлениях; эквивалентна шаровому шарниру и уничтожает три степени свободы соединяемых тел.
- 5. Плоскоподвижная связь с одним поворотом (рис. 1.10, г), представляющая собой три параллельных стержня, не лежащих в одной плоскости. Кинематическая характеристика: связь препятствует взаимному поступательному перемещению соединяемых тел Т, и Т2 вдоль осей стержней и двум поворотам в плоскостях, в которых попарно лежат стержни (вокруг осей х и у), но допускает поступательное перемещение в плоскости, перпендикулярной стержням; уничтожает три степени свободы соединяемых тел.
- 6. Линейно-подвижная связь с двумя поворотами (рис. 1.10, д), представляющая собой три стержня в одной плоскости, из которых два параллельны, а третий имеет с одним из них общий шаровой шарнир. Кинематическая характеристика: связь препятствует взаимным поступательным перемещениям соединяемых тел Т, и Т2 и повороту в плоскости стержней (xOz), но допускает поступательное перемещение по прямой, перпендикулярной плоскости стержней (по оси у), и два поворота (вокруг осей х и z). Уничтожает три степени свободы соединяемых тел.
- 7. Жесткое соединение (рис. 1.10, е) имеет следующую кинематическую характеристику: связь препятствует всем взаимным смещениям соединяемых тел Tj и Т2 относительно друг друга; уничтожает все шесть степеней свободы соединяемых тел и превращает их в одно неизменяемое целое.
Кроме вышеперечисленных простых связей, возможны и более сложные, получаемые добавлением к простым связям дополнительных соединительных стержней. Например, если к связи, показанной на рис. 1.10, в, добавить два стержня, препятствующие повороту вокруг двух осей, получим так называемый цилиндрический шарнир, допускающий поворот только вокруг оси х, проходящей через шаровые шарниры по концам пяти стержней (рис. 1.10, ж). Связи пространственных расчетных схем, представленные на рис. 1.10, являются узлами соединения двух тел. При соединении нескольких тел (чаще всего стержней) узлы пространственных расчетных схем, так же как и плоских, могут быть жесткими, шарнирными и комбинированными.