Электромагниты переменного тока
Мгновенные значения силы зависят от размеров выделенных частей полюса сердечника и от сопротивления короткозамкнутого витка. На рис. 7.50 сопоставлены временные зависимости силы, действующей на якорь с зазором 5 = 1,0 мм, при наличии и отсутствии витка с сопротивлением /?к;ш = 0,8 Ом. Сила изменяется с двойной частотой без изменения знака, но при отсутствии витка она каждую половину периода… Читать ещё >
Электромагниты переменного тока (реферат, курсовая, диплом, контрольная)
У электромагнитов постоянного тока ЭДС e (t) индуцируется в катушке только в переходных режимах, когда изменяется ток, движется якорь. В установившемся режиме ток в таком электромагните определяется активным сопротивлением провода катушки i = U/Rn]y У электромагнитов переменного тока ЭДС e (t) индуцируется и в установившихся режимах. Это ЭДС самоиндукции, т. е. вызванная изменением потокосцепления катушки от собственного тока. Поэтому напряжение на катушке всегда содержит две составляющие — напряжение на активном сопротивлении провода и на индуцируемой ЭДС: U = iRlip — e (t) = iRup + d’V/dt.
Для электромагнитов промышленной и повышенной частоты первое слагаемое меньше, чем напряжение на ЭДС, поэтому напряжение питания в основном определяет магнитный поток электромагнита. Поддержание магнитного потока при изменении зазора происходит за счет изменения тока. Если увеличивается зазор, то увеличивается ток. При синусоидальном напряжении питания электромагнита и допущении о постоянной магнитной проницаемости материалов сердечника и якоря в комплексной форме эти приближенные соотношения записываются в виде: U = у’соЧ7, vF = f//yco, или для модуля амплитуды потокосцепления х?т = /2vF ~ U/(4,44/).
Суммарное нотокосцепление складывается из рабочего потокосцепления и потокосцепления рассеяния. С увеличением зазора нотокосцепление рассеяния увеличивается, а рабочее потокосцепление уменьшается. С увеличением зазора ток увеличивается, и возрастает напряжение на активном сопротивлении провода, поэтому суммарное нотокосцепление уменьшается. Однако уменьшение потокосцепления значительно меньше, чем в такой же магнитной системе постоянного тока. По этой причине тяговые характеристики магнитов переменного тока более пологи, чем тяговые характеристики магнитных систем постоянного тока.
При расчете магнитной системы переменного тока необходимо учитывать потери в магнитопроводе из-за гистерезиса и индуцированных токов, а также действие внешних электропроводящих контуров (дополнительные замкнутые катушки, короткозамкнутые витки, другие электропроводящие тела), пронизываемых потоком первичной катушки магнитной системы. Потери определяют разные фазы магнитных потоков и МДС.
Электромагнит без подвижных частей и постоянной магнитной проницаемости сердечника в эквивалентной схеме электрической цепи можно представить в виде напряжений на эквивалентных сопротивлениях резистора UR и катушки индуктивности Uг: 
где i? = -0)ImvF//; L = Re 'Р/L
Выделяемая энергия на дополнительном активном сопротивлении в электрической цепи равна потерям энергии из-за индуцированных токов и магнитного гистерезиса при перемагничивании сердечника.
В магнитной цепи электромагнита переменного тока несовпадение фаз магнитного потока и МДС можно также моделировать активным и индуктивным магнитными сопротивлениями, которые могут быть определены из петли магнитного гистерезиса, снятой на переменном токе. В условиях синусоидального магнитного потока вебер-амперную характеристику материала приближенно представляют в виде эллипса (рис. 7.43, кривая 4), площадь которого равна площади петли гистерезиса. Это соответствует заданию параметров трубки магнитного потока в виде комплексного активно-индуктивного магнитного сопротивления ZM = RM + ywLM, которое определяет ориентацию и размеры осей эллипса. Пересечение эллипса с осью абсцисс в точке Uс устанавливает значение магнитной индуктивности в соответствии с формулой LM = |/Ус|/(соФ',), а магнитное сопротивление определяется из соотношения RM = /У'/Ф', где Ф', — амплитуда магнитного потока (см. рис. 7.43).
Принципы построения магнитной цепи отличаются от принципов построения других физических подсистем выбором типа фазовых переменных и элементов. Произведение фазовых переменных магнитной цепи — это энергия, а в других подсистемах это мощность. Поэтому в магнитной подсистеме элемент диссипации энергии — магнитная индуктивность, а магнитный резистор — элемент накопления энергии [3].
Магнитопроводы магнитных систем переменного тока выполняют в основном из кремнистых электротехнических сталей, которые обладают малыми потерями на перемагничивание (мала коэрцитивная сила) и на вихревые токи (повышенное удельное электрическое сопротивление). В целях уменьшения потерь на вихревые токи магнитопроводы изготавливают шихтованными в виде набора электрически изолированных друг от друга пластин толщиной от 0,1 до 1,0 мм. Для снижения потерь в магнитной системе переменного тока используют также и другие материалы, например магнитомягкие ферриты и аморфные сплавы.
Отрицательным свойством электромагнитов переменного тока, применяемых в электромеханических преобразователях, представляется уменьшение тягового усилия до нуля в момент нулевого значения магнитного потока. Из-за действия возвратной пружины начинается дребезг якоря. Чтобы снизить влияние на работу устройства непостоянства силы, создают второй магнитный поток, сдвинутый по фазе к первому. Конструктивное решение следующее: сердечник электромагнита у зазора с якорем (полюс) разделяют на две части, на одну из которых надевают короткозамкнутый виток. Индуцируемые в этом витке токи изменяют фазу магнитного потока в этой части сердечника (рис. 7.44).

Рис. 7.43. Приближенное представление вебер-амперной характеристики трубки магнитного потока при анализе потерь на перемагничиванис:
- 1 — основная кривая; 2 — предельный гистерезисный цикл;
- 3 — линеаризованная основная кривая; 4 — эллипс, эквивалентный по площади предельному гистерезисному циклу

Рис. 7.44. Короткозамкнутый виток в полюсе сердечника:
1 — шихтованный сердечник из электротехнической стали; 2 — короткозамкнутый виток: а — конструкция; б — векторная диаграмма магнитных потоков.
Типовая задача 2
Необходимо построить математическую модель и выполнить анализ динамики работы контактора (см. рис. 7.25) на переменном токе. На полюсах П-образного магнитопровода электромагнита установлены короткозамкнутые витки. Исходные данные следующие: напряжение питания электромагнита U — 220 В, f — 50 Гц; число витков N = 4000, магнитные сопротивления:
ймс0 = 2,375−105 1/Гн — магнитопровода сердечника без участка с витком;
Rmc2 = 0,5−105 1/Гн, — участка магнитопровода сердечника без витка;
/?мс, = 0,167−10э 1/Гн — участка магнитопровода сердечника с витком;
R(il = 0,667• Ю10-8Я 1/Гн — между якорем и участком магнитопровода с витком;
R{2 - 2,0−1010 -§я — между якорем и участком магнитопровода без витка;
RSV1 — 2.0? 10К 1/Гн — рассеяния между участками магнитопровода с витком и без витка;
Дмя = 0,8 -105 1/Гн — якоря.
Активное сопротивление одного короткозамкнутого витка RKm = 0,8 х х 10~4 Ом.
Функции для расчета силы:
Р( =-0,333−1010 'Ф/ш 1/Гн — от магнитного потока участка с короткозамкнутым витком;
Р2 = —1,0 • 1010 Ф| 1/Гн — от магнитного потока участка без короткозамкнутого витка.
Остальные параметры остаются прежними — как у контактора постоянного тока.
Решение
? На рис. 7.45 представлена модель электромеханической системы контактора в программной среде Matlab Simulink. В отличие от модели контактора постоянного тока в ней две электрические подсистемы: катушки электромагнита и короткозамкнутого витка. Электромагнит питается от синусоидального источника напряжения. Схема электрической подсистемы катушки показана на рис. 7.46, а. Она, в отличие от контактора постоянного тока, имеет меньшее сопротивление провода как отношение квадрата числа витков при одинаковой площади сечения окна катушки. Дополнительно в схему включен ключ, который формирует импульс напряжения длительностью 50 мс с задержкой 50 мс.

Рис. 7.45. Модель электромеханической системы контактора с электромагнитом переменного гока в программной среде Matlab Simulink.
Схема электрической подсистемы короткозамкнутого витка (см. рис. 7.46, б) состоит из последовательно включенных активного сопротивления витка и индуцируемой в витке ЭДС eK3B(t) =-cl^ K3Q/dt, где ^кзв — потокосцепление витка.

Рис. 7.46. Эквивалентные схемы электрических подсистем контактора переменного тока:
а — для катушки электромагнита; б — для короткозамкнутого витка Отличие эквивалентной схемы магнитной подсистемы (рис. 7.47) от схемы контактора постоянного тока в том, что имеется разветвление в полюсах сердечника на два потока: в части полюса без витка и с витком. В ветви полюса с короткозамкнутым витком включена МДС, создаваемая индуцируемым током в витке, которая и создает фазовый сдвиг магнитного потока в этой части полюса сердечника. Управление этой МДС осуществляется из электрической подсистемы короткозамкнутого витка. Так как в конструкции электромагнита два таких, то МДС удваивается, а ЭДС в электрической подсистеме витка формируется сигналом магнитного потока в ветви магнитной цепи витка. Между участками полюса с короткозамкнутым витком и без него подключено магнитное сопротивление рассеяния.

Рис. 7.47. Эквивалентная схема магнитной подсистемы контактора переменного тока
Тяговое усилие вычисляется как сумма двух сил от мгновенных значений выделенных магнитных потоков с полюсов сердечника. Для анализа тяговой характеристики электромагнита отсоединим механическую подсистему как показано на рис. 7.48.

Рис. 7.48. Модель электромагнита для построения тяговой характеристики
Расчет характеристики осуществляется последовательно для различных положений якоря. На входе схемы «хя» задается выбранное перемещение, а питание катушки осуществляется непрерывным синусоидальным напряжением с номинальными параметрами. На соответствующем выходе модели фиксируются мгновенное и среднее значение силы. Полученная таким образом тяговая характеристики для средних значений сопоставлена на рис. 7.49 с тяговой характеристикой электромагнита постоянного тока и статической механической характеристикой контактора (см. рис. 7.35), где 6 = хя + 3,5 мм.

Рис. 7.49. Тяговые и статическая механическая характеристики
электромагнита:
1 — электромагнит постоянного тока; 2 — статическая механическая характеристика; 3 — электромагнит переменного тока Тяговая характеристика электромагнита переменного тока имеет более пологий вид, чем у электромагнита постоянного тока: при малых зазорах якоря сила меньше, а при больших — больше.
Мгновенные значения силы зависят от размеров выделенных частей полюса сердечника и от сопротивления короткозамкнутого витка. На рис. 7.50 сопоставлены временные зависимости силы, действующей на якорь с зазором 5 = 1,0 мм, при наличии и отсутствии витка с сопротивлением /?к;ш = 0,8 Ом. Сила изменяется с двойной частотой без изменения знака, но при отсутствии витка она каждую половину периода обращается в ноль и имеет большую амплитуду пульсаций. Виток сглаживает колебания силы. Следует отметить, что в первые периоды переходного процесса включения электромагнита переменного тока даже при наличии короткозамкнутого витка могут быть малые значения силы, т. е. возможен кратковременный дребезг якоря из-за действия возвратной пружины.
t, с.

Рис. 750. Мгновенное значение действующей на якорь силы при наличии и отсутствии короткозамкнутого витка (тонкая линия)
Динамику работы контактора с электромагнитом переменного тока характеризуют рассчитанные по модели рис. 7.45 осциллограммы перемещений якоря и контакта, тягового усилия и тока, приведенные на рис. 7.51. У перемещения якоря наблюдаются малые значения смещения от упора после срабатывания из-за имеющих место малых мгновенных значений тягового усилия в первые периоды переходного процесса включения электромагнита к источнику синусоидального напряжения. В переходном процессе амплитуда пульсаций силы достигает трехкратного значения по сравнению со средним установившимся значением. В момент срабатывания электромагнита наблюдаются также значительные броски тока (пусковой ток) по сравнению с установившимся значением. Па значение пускового тока оказывает влияние большой зазор якоря в момент включения и, соответственно, меньшая индуктивность электромагнита, а также возникновение ударного тока из-за апериодической составляющей тока переходного процесса при включении активно-индуктивной нагрузки. При отключении электромагнита возникает короткий импульс перенапряжения на катушке, вызванный коммутацией тока в цепи с индуктивностью. Электромагнит переменного тока обладает значительной собственной индуктивностью. 4
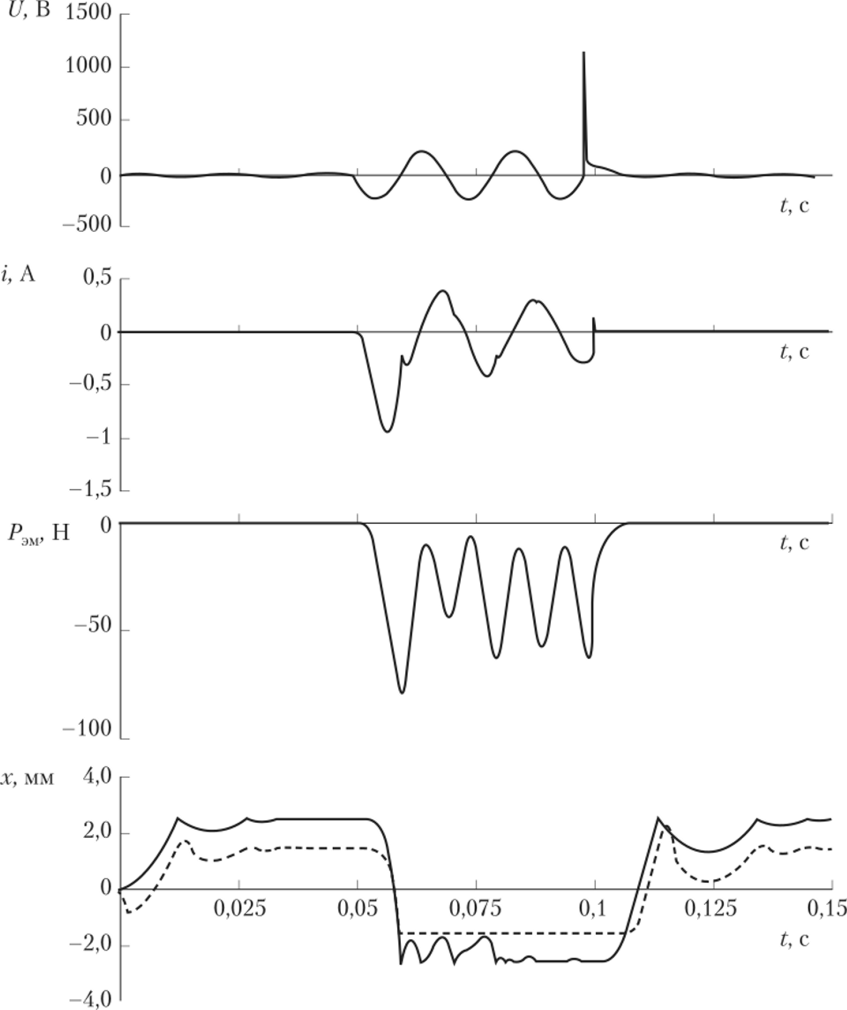
Рис. 751. Временные зависимости напряжения на катушке электромагнита переменного тока (U), тока в катушке электромагнита (i), электромагнитной силы (Рэм) и перемещений якоря и контакта (хя, хк).