Классификация САУ по виду их математических моделей
Методы решения уравнений различных классов разработаны неодинаково. Наиболее подробно изучены методы решения линейных уравнений, особенно с постоянными коэффициентами, и значительно меньше разработаны методы решения нелинейных уравнений. Все это однозначно определяет и степень развития различных разделов ТАУ. Так, если теория линейных стационарных систем разработана достаточно полно, то теория… Читать ещё >
Классификация САУ по виду их математических моделей (реферат, курсовая, диплом, контрольная)
Теория автоматического управления имеет дело с математическими моделями, отражающими свойства реальных систем посредством математических соотношений. Всякая математическая модель способна описать систему лишь приближенно с учетом различного рода допущений. На практике стремятся выбрать модель по возможности наиболее простую, что сокращает усилия на ее исследования. Противоречие между простотой модели и степенью ее приближения к оригиналу является обычной трудностью любой теории, в том числе и ТАУ. Непременным требованием при выборе модели считается соответствие изучаемых в ней процессов тем, которые протекают в реальной системе. Если такого соответствия нет, то исследования теряют всякий смысл. Наиболее достоверным признаком пригодности выбранной модели будет сравнение полученных с ее помощью теоретических результатов с результатами экспериментальной проверки реальной системы. В некоторых случаях допустимо сравнение с данными, полученными путем исследования более точных моделей. Таким образом, само понятие модели является условным, зависящим от характера задач и условий их решения. Естественно, что классификация САУ по виду их математических моделей в некотором смысле также будет условной. В самом общем виде математической моделью САУ является оператор преобразования воздействий. Оператором системы называется преобразование, где каждой функции, определяющей закон изменения воздействия, ставят в соответствие другую функцию, определяющую закон изменения выходных координат. Формально это преобразование, например для задающего воздействия, обозначается как.
y (t)=x (t)s (t),.
где s (t) — оператор системы по задающему воздействию.
Аналогично определяются и операторы по другим воздействиям. В настоящее время отсутствуют общие методы нахождения операторов желаемой степени сложности и точности для всех классов систем. В этой части большую роль играют опыт и способности исследователя. Однако по ряду частных задач приемы составления математических моделей достаточно хорошо отработаны и экспериментально подтверждена удовлетворительная точность получаемых при этом результатов. Так как теория автоматического управления имеет дело с математическими моделями, то в дальнейшем, упоминая о системах, будем подразумевать, что речь идет об их математических моделях, адекватность которых реальным системам считается доказанной.
В первую очередь системы подразделяются на линейные и нелинейные. Линейной называется такая система, для которой справедлив принцип суперпозиции. Этот принцип для оператора системы записывается следующим образом:

Все остальные системы относятся к нелинейным. Подобное подразделение имеет практическое значение. Теория линейных систем существенно проще и разработана значительно подробнее, чем теория нелинейных, поэтому при ее составлении модели системы стремятся выбрать ее в классе линейных, что значительно упрощает методику исследования. Конечно, и здесь должно выполняться условие адекватности модели реальным исследуемым явлениям с необходимой степенью точности.
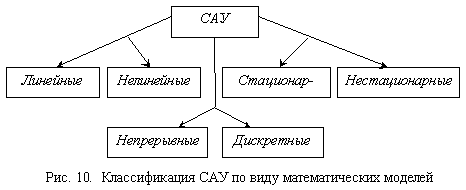
Информация о процессах, протекающих в устройствах системы, передается посредством сигналов различной физической природы: электрических, механических и других. При этом сама информация может быть закодирована в сигналах различным способом. Если все сигналы в системе можно рассматривать как непрерывные, то и сами системы называются непрерывными. Однако в ряде случаев информацию целесообразно передавать с помощью дискретных сигналов, например в виде импульсов напряжения или в цифровом коде, и тогда системы называются дискретными. Часто в одной и той же системе бывают как непрерывные, так и дискретные сигналы. Тогда системы называются дискретно-непрерывными или гибридными. алгоритм программирование информация разомкнутый Если свойства системы с течением времени изменяются и оператор системы s (t) зависит от времени, то системы называются нестационарными, а при неизменных свойствах оператора — стационарными. Основные классы автоматических систем с точки зрения их математических моделей показаны на рис. 10.
Для систем с сосредоточенными параметрами, которые рассматриваются в данной теме, наиболее удобной формой представления операторов являются уравнения. При описании непрерывных систем используются дифференциальные уравнения, а дискретных — разностные уравнения; линейные системы описываются линейными уравнениями, нелинейные — нелинейными; у стационарных систем уравнения имеют постоянные коэффициенты, а у нестационарных — переменные.
В итоге исследование САУ сводится к явному или неявному нахождению решений соответствующих уравнений. С помощью дифференциальных и разностных уравнений удается отразить такие характерные особенности систем, как инерционность и временной характер процессов, протекающих в них. Инерционность выражается в том, что система не может мгновенно реагировать на внезапно приложенное к ней воздействие, а его отработка происходит с некоторым запаздыванием и по форме будет отличаться от исходного воздействия. Инерционные системы называются динамическими, а сама ТАУ является разделом теории динамических систем.
Методы решения уравнений различных классов разработаны неодинаково. Наиболее подробно изучены методы решения линейных уравнений, особенно с постоянными коэффициентами, и значительно меньше разработаны методы решения нелинейных уравнений. Все это однозначно определяет и степень развития различных разделов ТАУ. Так, если теория линейных стационарных систем разработана достаточно полно, то теория нелинейных систем, особенно нестационарных, разработана лишь в отдельных аспектах. Все эти соображения существенно сказываются на методологии изложения ТАУ.
На практике использование линейных систем часто дает определенные преимущества в качестве управления. Поэтому имеющиеся реальные систе-мы во многих случаях работают в линейном режиме. Все это делает теорию линейных систем фундаментальной частью всей теории автоматического управления.
Таким образом, классификация САУ по виду их математических моделей играет особую роль, так как она определяет структуру изложения теории автоматического управления и тем самым влияет на качество усвоения учебного материала.