Тиристорные электроприводы с раздельным управлением

Частота вращения двигателя стала нарастать, когда амплитудное знамение пульсирующего момента превышает 18 Нм. Через 1,1с частота вращения достигла заданного значения. При реверсе наблюдается большая пауза, в течение которой идет переходный процесс в регуляторах скорости и тока. Как только амплитуда момента двигателя превысила 18 Нм, частота вращения начала нарастать в отрицательном направлении… Читать ещё >
Тиристорные электроприводы с раздельным управлением (реферат, курсовая, диплом, контрольная)
Схема модели представлена на рис. 2.42 и включает в себя следующие элементы:
— двигатель постоянного тока DC Machine I12M, блок Step 3 задаёт реактивную нагрузку на двигатель по входу TR
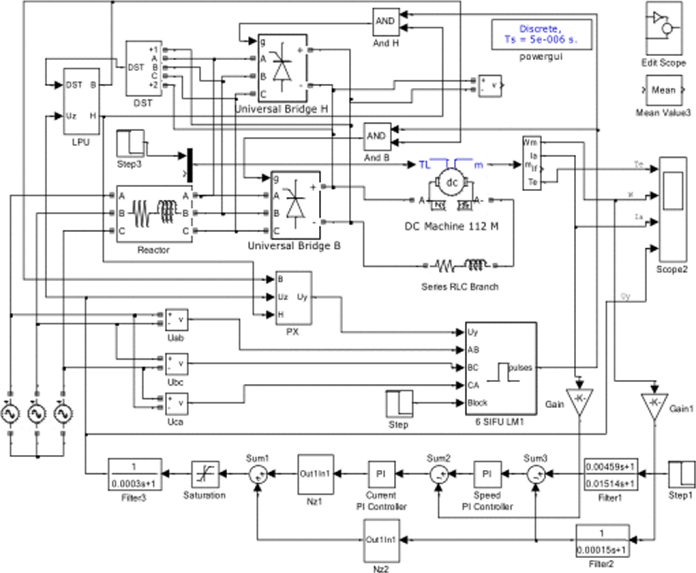
Рис. 2.42. Схема модели электропривода с раздельным управлением в Simulink (Fig242)
- — реверсивный преобразователь с раздельным управлением Universal Bridge В и Н
- — систему импульсно-фазового управления (СИФУ) линейного типа, модернизированную 6 SIFU LM I. Uab, Ubc и Uca — синхронизирующие напряжения, определяющие правильный порядок выдачи сигналов управления тиристорами;
- — And В и And Н — схемы И для управления раздельными комплектами от одной СИФУ
- — датчик состояния вентилей (тиристоров) DST. DST контролирует состояние всех тиристоров обоих комплектов и если все тиристоры закрыты (не проводят ток), то на выходе блока DST появляется логический сигнал единичного уровня;
- — блок логического управления тиристорными комплектами LPU. Имеет два логических выхода В и Н и два входа — логический DST и аналоговый Uz, управляющий работой выпрямительных комплектов;
- — блок переключения характеристик РХ, используется при управлении выпрямительными комплектами одной схемой СИФУ;
- — фильтр в канале обратной связи по скорости двигателя Filter!;
- — задатчик скорости (частоты вращения) Stepp,
- — задатчик реактивного момента сопротивления Step3;
- — фильтр Filter 1, оптимизирующий реакцию РЭП на ступенчатое воздействие;
- — /7//-регулятор скорости Speed PI Controller. Блочная схема разработанной модели изодромного пропорционально-интегрального регулятора показана на рис. 2.43.
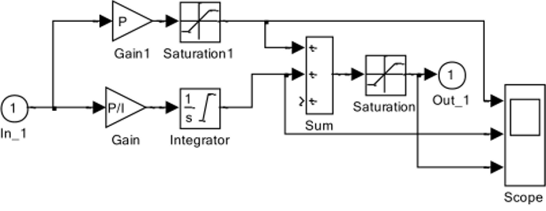
Рис. 2.43. Модель пропорционально-интегрального регулятора в Simulink
Пропорциональная часть (коэффициент усиления регулятора) представлена усилителем с коэффициентом усиления Р (Proportional). Постоянная времени регулятора (время изодрома) вводится как 1
(Integral). Интегральная часть регулятора представлена интегратором Integrator с единичным усилением и последовательно включенным усилителем Gain с коэффициентом усиления Р/1. Предусмотрено ограничение интегральной составляющей выходного напряжения интегратора (Limit Integr) и пропорциональной составляющей (Limit Out).
На рис. 2.44 представлено окно ввода параметров регулятора скорости. Установка ограничения интегратора производится в строке Limit Integr. Напряжение ограничения установлено менее ±10 В из условия обеспечения нормального управления в «большом». Общее ограничение выходного напряжения регулятора скорости (Limit Out) установлено ±10 В (рис. 2.44), что соответствует заданию пускового тока около 200 А;
— /7Я-регулятор тока Current PI Controller, окно ввода параметров которого показано на рис. 2.45;
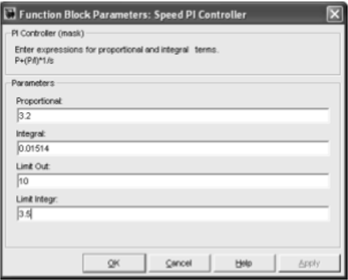
Рис. 2.44. Окно ввода параметров регулятора скорости
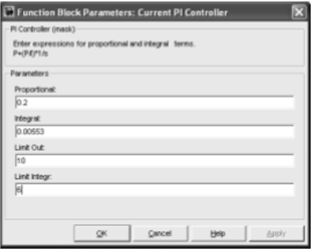
Рис. 2.45. Окно ввода параметров регулятора тока
- — фильтр на входе СИФУ Filter3;
- — адаптивное устройство (нелинейные звенья Nz.1 и Nz2). Выполнено в соответствии с рекомендациями, приведёнными в [7].
При раздельном управлении группами реверсивного ТП в области малых нагрузок преобразователь работает в режиме прерывистого тока и имеет нелинейные характеристики. При проектировании реверсивных 777 с раздельным управлением для широкорегулируемьгх быстродействующих РЭП целесообразно принять и осуществить линеаризацию характеристик преобразователя в режиме прерывистого тока, применив адаптивное устройство (АУ) на входе СУ ТП. А У состоит из нелинейного звена Nzl (рис. 2.46) и звена Nz2 (рис. 2.48).
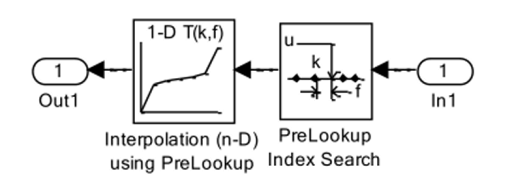
Рис. 2.46. Структура нелинейного звена Nzl На рис. 2.47 показаны окна ввода параметров нелинейного звена.
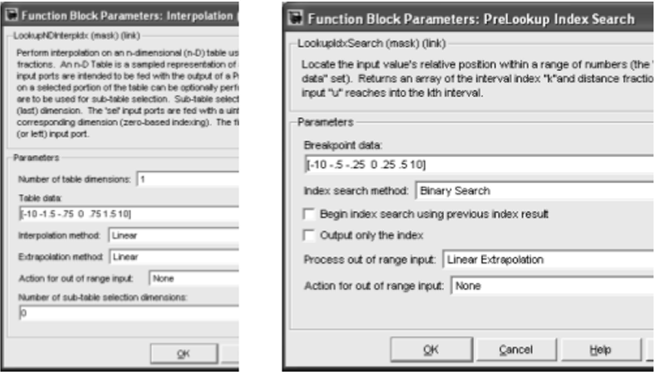
Рис. 2.47. Окна ввода параметров нелинейного звена Nzl
Схема модели нелинейного звена Nz2 приведена на рис. 2.48.
На рис. 2.49 показано окно ввода параметров нелинейного звена Nz2.
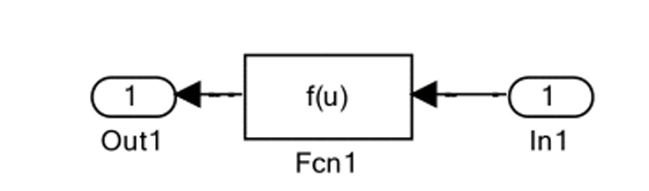
Рис. 2.48. Структура нелинейного звена Nz2
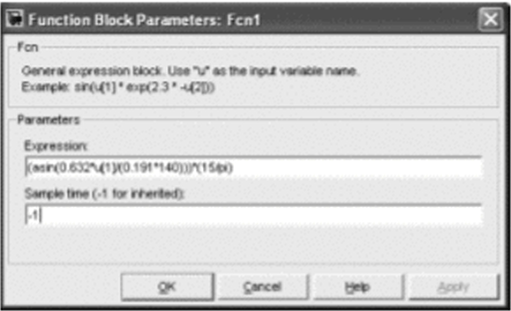
Рис. 2.49. Окно ввода параметров нелинейного звена Nz2
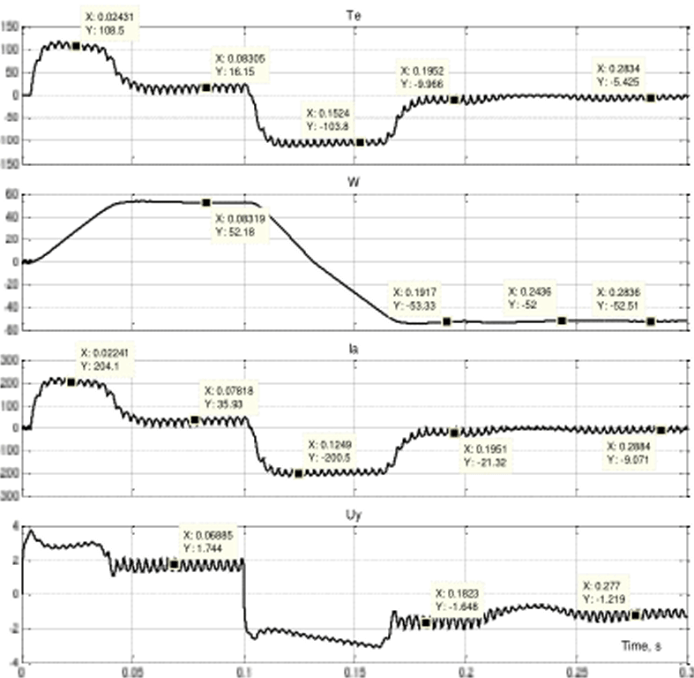
Рис. 2.50. Реакция электропривода на управляющее воздействие ±10 В с реактивной нагрузкой 18 Нм (уменьшение нагрузки до 5 Нм в 0,2 с)
Вводим в разработанную модель электропривода расчетные данные и произведем моделирование работы электропривода при ступенчатом управляющем воздействии при полной нагрузке при различных задающих напряжениях в одномассовом варианте.
На рис. 2.50 представлена реакция электропривода на управляющее воздействие ±10 В.
Полученные результаты свидетельствуют, что электропривод отработал управление правильно. Максимальный пусковой ток нс превышает 200 А, установившееся значение частоты вращения 52,18 рад/с незначительно отличается от заданного значения 52,5 рад/с. Электропривод работает с реактивным моментом сопротивления (с изменением направления вращения знак момента и тока двигателя также изменился на противоположный).

Рис. 2.51. Реакция электропривода на управляющее воздействие ±5 В с реактивной нагрузкой 18 Нм (уменьшение нагрузки до 5 Нм в 0.2 с).
В связи с пульсирующим характером тока и момента двигателя измерение средних значений средствами Simidink затруднено. Поэтому измеренные параметры диаграмм (рис. 2.50) несколько расходятся с теоретическими. При сбросе нагрузки до 5 Нм в момент времени 0,2 с частота вращения возросла до значения минус 53,33 1/с и восстановилась до значения минус 52,51 1/с. ПИ-регулятор выполнил своё назначение.
На рис. 2.51 показаны результаты моделирования процесса пускареверса привода на частоту вращения 26,25 1/с с реактивной нагрузкой. Электропривод отработал задание достаточно чётко.
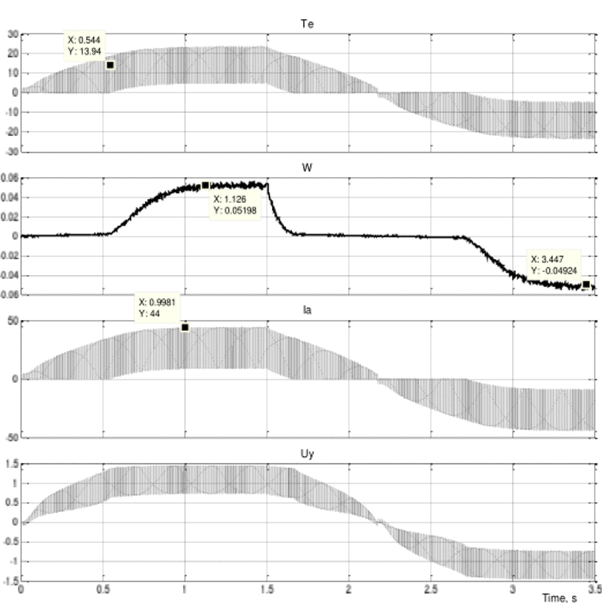
Рис. 2.52. Пускреверс ни малую частоту вращения ±0.0525 1/с с реактивной нагрузкой 18 Нм
Исследуем поведение привода при пуске-реверсе на минимальную частоту вращения, в тысячу раз меньшую максимальной 52,5 1/с. Задание на входе системы ±0,01 В, нагрузка реактивная 18 Нм. Результат моделирования проиллюстрирован на рис. 2.52. Характерной особенностью режима является работа с большими относительными пульсациями всех параметров.
Частота вращения двигателя стала нарастать, когда амплитудное знамение пульсирующего момента превышает 18 Нм. Через 1,1с частота вращения достигла заданного значения. При реверсе наблюдается большая пауза, в течение которой идет переходный процесс в регуляторах скорости и тока. Как только амплитуда момента двигателя превысила 18 Нм, частота вращения начала нарастать в отрицательном направлении. Время пуска большое, примерно 1 с.
Для улучшения наглядности результатов моделирования пропустим исследуемые сигналы через блоки Mean Value (усреднители) и будем наблюдать средние значения пульсирующих сигналов. Схема модели принимает вид, показанный на рис. 2.53.
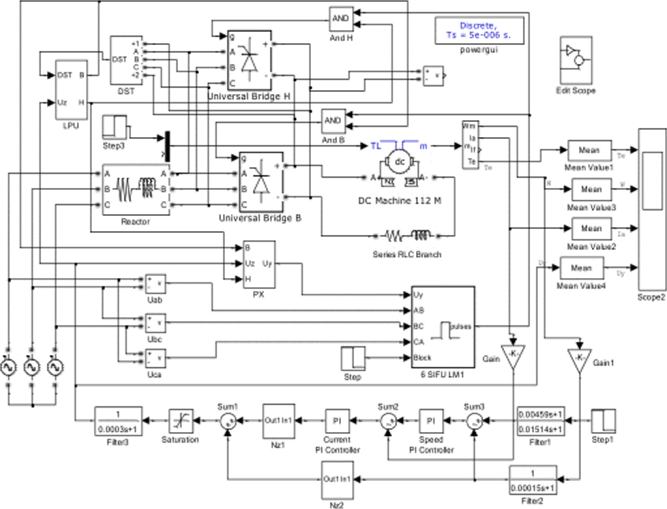
Рис. 2.53. Схема модели электропривода с раздельным управлением с выделением среднего значения пульсирующего сигнала
Вместо рис. 2.52 получена диаграмма в средних значениях исследуемых сигналов (рис. 2.54).
Кроме наглядности появились некоторые особенности, которые необходимо пояснить. Процесс нарастания частоты вращения начинается с момента двигателя чуть более 10 Нм, при реактивном моменте нагрузки 18 Нм. Это вызвано тем, что при таком среднем значении момента двигателя амплитудное его значение достигло 18 и более Нм. Этим же объясняется отличие среднего значения момента двигателя 17,14 Нм в установившемся режиме от статической реактивной нагрузки 18 Нм.
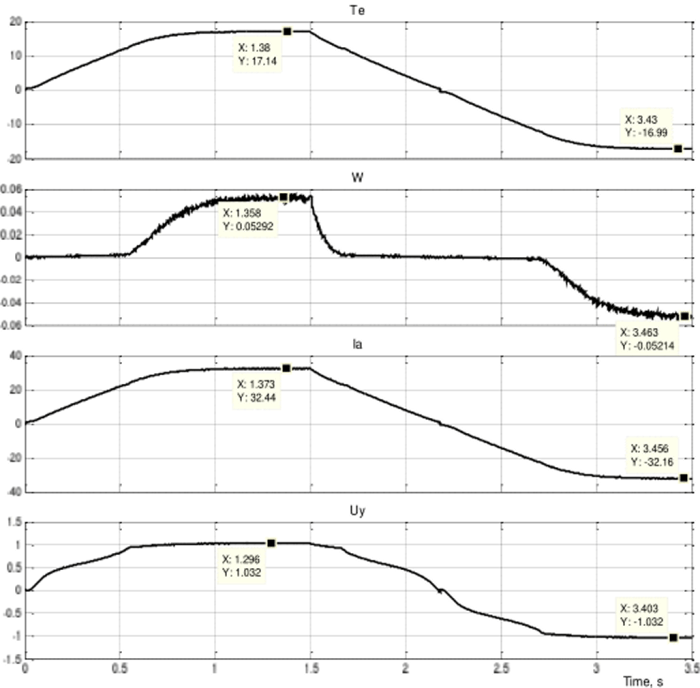
Рис. 2.54. Пускреверс на малую частоту вращения ±0,0525 1/с с реактивной нагрузкой 18 Нм
Отработанное заданное значение частоты вращения просматривается более чётко, чем на диаграмме рис. 2.52. Можно сделать вывод, что если тахогенерагор способен достоверно формировать сигнал обратной связи по частоте вращения, то данный привод способен работать в диапазоне регулирования частоты вращения 1000.

Рис. 2.55. Пускреверс на малую частоту вращения ±0,0525 1/с с реактивной нагрузкой 18 Нм (сброс нагрузки до 5 Нм при 3,5 с)
Исследуем поведение привода на малой частоте вращения при сбросе нагрузки с 18 Нм до 5 Нм (см. рис. 2.55).
Выделение гладкой усреднённой составляющей частоты вращения двигателя произведено с помощью блока Мест Value. Исследование показало, что отклонение частоты вращения составило минус 1,471 1/с и через 0,25 с частота вращения восстановилась до заданного значения минус 0,5 256 1/с.
Полученные показатели работы привода на малой частоте вращения должны быть сопоставлены с техническим заданием и принято решение о соответствии или дальнейшей доработки привода.
На рис. 2.56 представлена схема модели тиристрного электропривода с раздельным управлением.
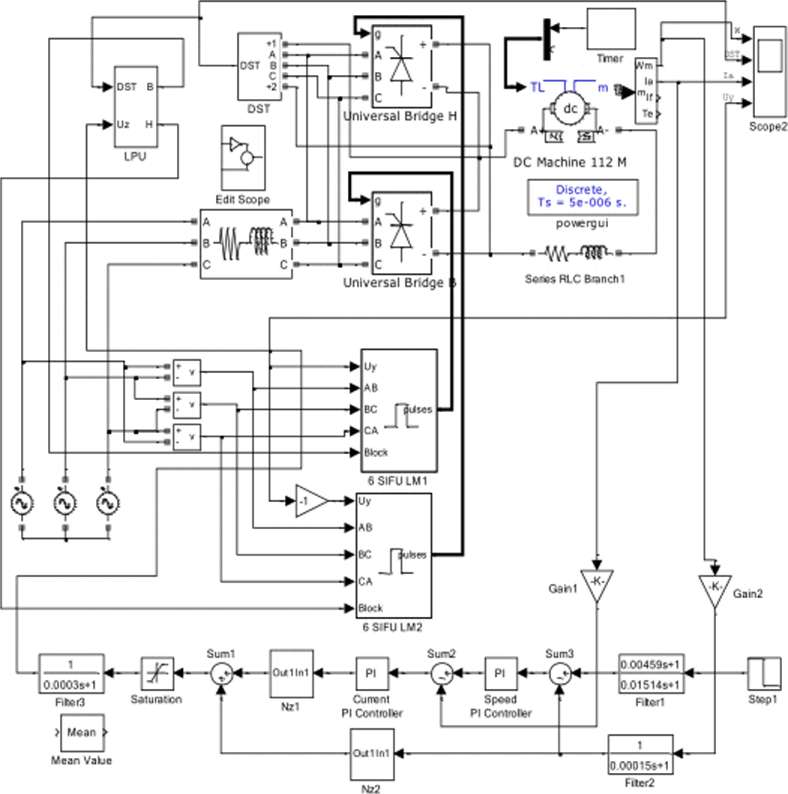
Рис. 2.56. Схема модели электропривода с раздельным управлением с отдельными С И ФУ на каждый комплект (Fig256)
Отличием от предыдущей схемы является использование двух комплектов СИФУ. Необходимость применения блока РХ отпала, разрешение работы того или иного СИФУ задаётся по входу Block.
Результаты моделирования работы электропривода на большой, средней и малой частотах вращения аналогичны выше рассмотренному приводу и не приводятся в пособии.