Дельта-модуляция.
Системные и прикладные аспекты
При работе дельта-модулятора, как показано на рис. 23.21, б, предсказанный сигнал отстоит от входного сигнала не более чем на размер вертикальной ступеньки. Однако иногда схема не в состоянии отслеживать быстрые изменения во входном сигнале и появляются так называемые перегрузки по крутизне (рис. 23.22), происходящие, когда скорость изменения входного сигнала превышает максимальную скорость… Читать ещё >
Дельта-модуляция. Системные и прикладные аспекты (реферат, курсовая, диплом, контрольная)
Дельта-модуляция (ДМ) является еще одним способом аналого-цифрового преобразования, основанном на корреляции между отсчетам в речевом сигнале. Систему связи ДМ предложил советский инженер Л. А. Коробков.
(1949 г.), за рубежом система была предложена Де Ягером в 1952 г. Дельтамодуляция фактически есть особый случай ДИКМ, когда используется только один разряд на разность отсчетов. Этот единственный разряд определяет полярность разности и указывает, увеличивался или уменьшился сигнал за время после последнего отсчета. Поскольку характер изменений входного сигнала передается однобитовой комбинацией, то требуется более высокая чистота дискретизации, чем в системе с ИКМ или многоразрядной ДИКМ. Здесь частота дискретизация численно равна скорости передачи.
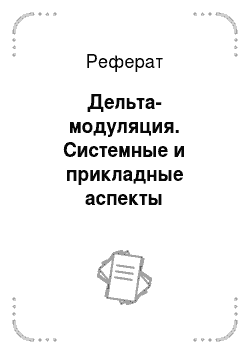
Функциональная схема системы с ДМ и основные процессы в ней представлены на рис 23.21. Важным элементом схемы является компаратор, который разность входного сигнала и аппроксимированного (предсказанного) входного сигнала, имеющего ступенчатый вид, квантует на два уровня: +1, если входной сигнал больше предсказанного (разность положительна), и -1, если он меньше предсказанного сигнала (разность отрицательна). Вид напряжения на выходе компаратора показан на рис. 23.21, б. Это напряжение после перемножителя преобразуется в последовательность двухполярных импульсов, следующих с частотой /д. Далее импульсы поступают на вход формирователя цифрового сигнала (ФЦС), заменяющего двухполярные импульсы двоичным сигналом (0, 1) для передачи. На приеме происходит обратный процесс. С выхода приемника цифрового сигнала (ПрЦС) двухполярные импульсы подаются на интегратор, формирующий аппроксимирующий (ступенчатый) сигнал, который затем сглаживается с помощью ФНЧ.
Проследим работу схемы по рис. 23.21. С выхода фильтра аналоговый входной сигнал поступает на сумматор, куда подается также предсказанный сигнал из цепи ОС (с выхода интегратора). На выходе сумматора образуется разность дельта. На первом шаге дискретизации Д > О и напряжение на выходе компаратора равно +1. В конце шага с помощью умножителя производится отсчет разности. В результате появляется единичный положительный импульс, который подается на ФЦС и одновременно в цепи ОС на вход интегратора, выполняющего функции ЦАП. Этот импульс формирует единичную «ступеньку вверх» на выходе интегратора (в простейшем случае интегратор может состоять из конденсатора, подзаряжаемого или разряжаемого с помощью двухполярных импульсов). Процесс повторяется до тех нор, пока в моменты отсчета величина ступеньки меньше входного сигнала (Д > 0). Как только она превзойдет величину входного сигнала (Д 0), поэтому в следующий момент отсчета появляется положительный импульс, формирующий «ступеньку вверх». В результате на среднем участке входного сигнала дельта поочередно меняет знак (в канале будет чередующаяся последовательность 1 и 0).
Сигнал в цепи ОС продолжает создавать ступеньки в одном направлении, пока значение аппроксимирующего сигнала в два последовательных момента отсчета не окажутся по разные стороны кривой входного сигнала. В этот момент ступеньки в цепи ОС меняют свое направление на обратное.
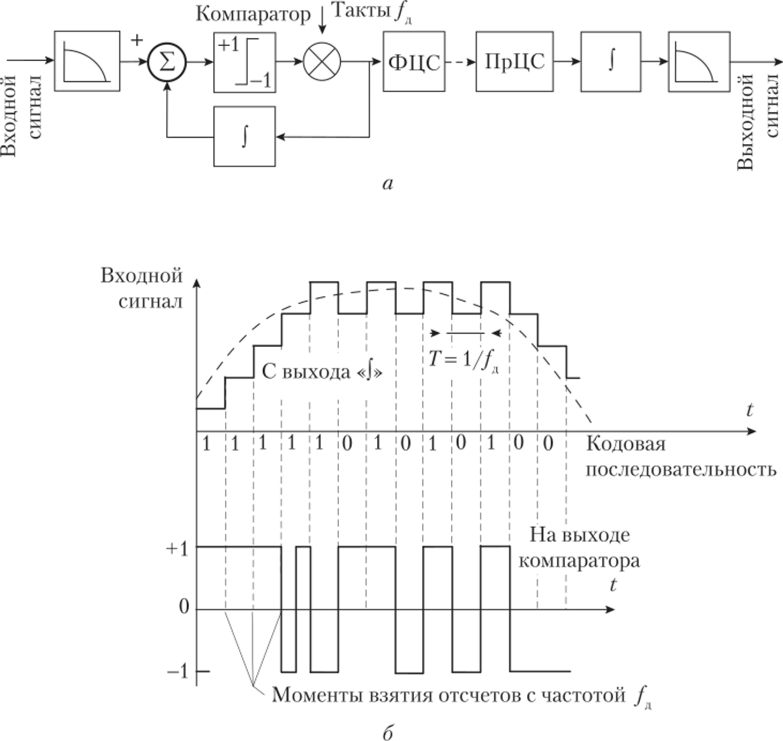
Рис. 23.21. Функциональная схема ДМ-системы и основные процессы ДМ.
При работе дельта-модулятора, как показано на рис. 23.21, б, предсказанный сигнал отстоит от входного сигнала не более чем на размер вертикальной ступеньки. Однако иногда схема не в состоянии отслеживать быстрые изменения во входном сигнале и появляются так называемые перегрузки по крутизне (рис. 23.22), происходящие, когда скорость изменения входного сигнала превышает максимальную скорость изменения, которая может быть получена в цепи ОС. Устранение перегрузки по крутизне предполагает увеличение вертикального размера ступеньки предсказываемого сигнала, что (очевидно из рисунка) влечет рост шумов дробления для медленно меняющихся сигналов.
В простейшем дельта-модуляторе используется дискрета квантования (вертикальная ступенька) постоянного размера для всех уровней сигнала, он называется равномерным или линейным дельта-модулятором (ЛДМ). Это не лучший вариант, хотя и наиболее простой. Логично посчитать, что адаптация величины дискреты квантования улучшит характеристики ДМ. Таким образом, мы приходим к адаптивной дельта-модуляции (АДМ).

Рис. 23.22. Перегрузка по крутизне.
Предложено большое число различных алгоритмов адаптации. В основном все они повышают дискрету квантования, когда устанавливается начало перегрузки по крутизне, и снижают — при уменьшении крутизны входного сигнала. В 1968 г. была предложена АДМ, использующая непрерывное изменение крутизны (ДМНИК). В большинстве алгоритмов АДМ адаптация осуществляется по выходу, когда дискрета квантования изменяется по выходной кодовой последовательности. Действительно, появление в кодовой последовательности блоков единиц или нулей свидетельствует о недостаточной скорости нарастания или спадания сигнала в цепи ОС. В этом случае необходимо увеличить аналогичные изменения дискреты квантования последовательности. Скорость передачи в реальных системах АДМ колеблется в пределах 20—40 кбит/с.
Дальнейшим развитием систем разностного квантования является разностная ИКМ (РИКМ). Здесь для квантования разности между текущим и предсказанным значением используется многоуровневый квантователь. В системах РИКМ широко применяются методы адаптивного квантования (АРИКМ).