Теорема о взаимности перемещений
Рассмотрим пример (рис. 5.13) для случая, когда в первом состоянии действует единичная сила Р = 1, а во втором момент М2 = 1. Силе Р = 1 во втором состоянии соответствует линейное перемещение 8i2, а моменту М2 = 1 — угол поворота сечения в первом состоянии. Для этого случая также 612 = 621, т. е. 612 = ф21. Работу 1б21 можно определить интегрированием элементарных работ. Приложим в сечении… Читать ещё >
Теорема о взаимности перемещений (реферат, курсовая, диплом, контрольная)
В п. 5.2 сформулирована теорема о взаимности виртуальных работ внешних сил. Согласно формуле (5.9) Атп = Апт. Рассмотрим частный случай, когда в обоих состояниях системы (рис. 5.12) действуют две силы Р= 1. Согласно принятым в п. 5.1 обозначениям перемещение по направлению силы Р = 1 во втором состоянии равно 812, а по направлению ?2 = 1 в первом состоянии S21. Формула (5.9) для этого частного случая запишется в виде Pi612 = Р2821, но так как обе силы равны единице (Р = Р2 = 1), то получим.

Равенство (5.19) определяет взаимность перемещений.
Рассмотрим пример (рис. 5.13) для случая, когда в первом состоянии действует единичная сила Р = 1, а во втором момент М2 = 1. Силе Р = 1 во втором состоянии соответствует линейное перемещение 8i2, а моменту М2 = 1 — угол поворота сечения в первом состоянии. Для этого случая также 612 = 621, т. е. 612 = ф21.
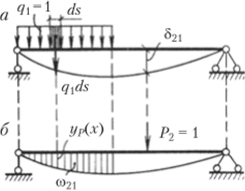
Рис. 5.14.
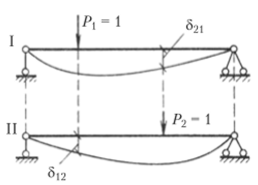
Рис. 5.12.
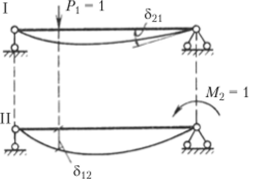
Рис. 5.13.
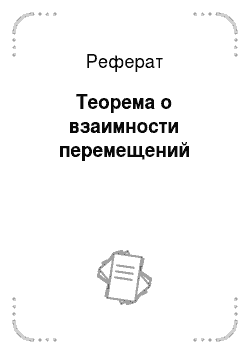
Приведем еще один пример. Пусть в первом состоянии на часть балки действует равномерно распределенная нагрузка q = = 1, а во втором — сила Р2 = 1 (рис. 5.14). В первом случае имеем дело с обобщенной единичной нагрузкой q (рис. 5.14, а). Выясним, какой физический смысл имеет обобщенное перемещение. Для этого необходимо теорему о взаимности перемещений трактовать как теорему о взаимности работ при единичных нагрузках: 1 -8|2 = 1 *821.
Работу 1б21 можно определить интегрированием элементарных работ. Приложим в сечении, отстоящем от левой опоры на расстоянием, силу, действующую на элемент балки cLx: dP = qdx. Виртуальная работа этой силы па перемещении ур (х), взятом во втором состоянии (рис. 5.14, б) будет qyP(x)dx. Полная работа.

Этот интеграл равен площади линии прогибов во втором состоянии, которая заштрихована на рис. 5.14, б. Таким образом, 812 = 0)21;
Во избежание недоразумений отметим еще раз, что перемещения 8j2 или 82j берутся по направлению соответствующих внешних силовых воздействий. Поясним сказанное на примере. На рис. 5.15 показаны два состояния ломаного стержня под действием единичных факторов Р = 1 и М2 = 1. Точка k приложения силы Р{ во втором состоянии переместится от момента М2 = 1 в точку k. Перемещение этой точки в плоскости стержня будет равно отрезку kk. Однако полное перемещение точки k не совпадает с направлением силы Р. В^этом случае 82i представляет собой проекцию отрезка kk на линию, которая во втором состоянии имеет такое же направление, как сила Р{ в первом состоянии. Следовательно, в равенстве (р12 = 821 величины (р и 8 должны браться в соответствии с рис. 5.15.
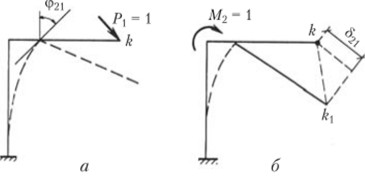
Рис. 5.15.
В заключение отметим, что размерности 812 и 62i могут быть разные, поэтому равенство (5.19) надо рассматривать как равенство работ от единичных воздействий.