Синтез оптимального управления методом Калмана
В соответствии с методом Калмана предполагается, что управление U ищется в форме: В соответствии с системой (1.1) матрица состояния объекта будет иметь вид: В качестве критерия оптимальности выберем квадратичный функционал: P — решение алгебраического уравнения Рикатти, которое имеет вид: Система для определения коэффициентов р13, р23, р33 имеет вид: Система задана уравнениями возмущенного… Читать ещё >
Синтез оптимального управления методом Калмана (реферат, курсовая, диплом, контрольная)
Система задана уравнениями возмущенного движения:
y1=y2;
y2=y3; (4.1).
y3=-b3y3-b2y2-b1y1-mU.
Запишем эту систему в матричном виде.
Y= B Y+M U (4.2).
В качестве критерия оптимальности выберем квадратичный функционал:

(4.3).
В соответствии с методом Калмана предполагается, что управление U ищется в форме:
U=C-1 MT P (t) Y (4.4).
где С -1 — обратная матрица С;
P — решение алгебраического уравнения Рикатти, которое имеет вид:
P B+BTP+A-P M C-1MT P=0 (4.5).
В соответствии с системой (1.1) матрица состояния объекта будет иметь вид:
0 1 0.
B =0 0 1.
— b1 -b2 -b3
Матрица управления имеет вид:
М= 0;
m.
a1 0 0 p11 p12 p13 c1 0 0.
A= 0 a2 0; P= p21 p22 p23; C= 0 c2;
0 0 a3 p31 p32 p33 0 0 c3
Подставляя уравнение (4.5) и решая это уравнение получим симметричную матрицу Р в которую входят неизвестные коэффициенты р13, р23, р33, которые и являются коэффициентами оптимального управления матрицы:

Система для определения коэффициентов р13, р23, р33 имеет вид:
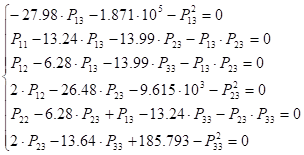
(4.6).
С помощью программы MathCad решаем систему (4.6), в результате чего получим значения коэффициентов р13, р23, р33 :
р13 = 523,14; р23 = 359,24; р33 = 35,21.
Оптимальное управление найдем путем подстановки коэффициента оптимального управления в уравнение (4.4):
U=-m (р13 x1+ р23 x2+р33 x3) (4.7).
Полученные коэффициенты регулятора равны:
m1=15 170.3; m2=523.14; m3=359.24.