Управление нелинейными объектами размерностью 2x1
Анализ показал, что основным фактором, сдерживающим быстродействие медленного тракта, является ограничение скорости нарастания выходного сигнала. Основным сдерживающим фактором быстрого тракта является ограничитель уровня выходного сигнала. Учет обоих этих факторов, например, при моделировании, требует применения в качестве «тестовых» сигналов отнюдь не единичного ступенчатого воздействия… Читать ещё >
Управление нелинейными объектами размерностью 2x1 (реферат, курсовая, диплом, контрольная)
Целесообразно проанализировать задачу управления объектом, содержащим два канала управления, каждый из которых ограничен нелинейными свойствами, один — по быстродействию, другой — по диапазону управления. Эта задача возникает при управлении лазерными системами и традиционно решается применением двух каналов управления — медленным и быстрым.
Применение двух каналов воздействия на одну выходную величину широко практикуется в лазерной физике. В частности, методом разделения движений обеспечивают совмещение требований, но быстродействию и диапазону управления, используя узкополосный канал для управления в большом диапазоне, а широкополосный — для обеспечения широкой полосы и устойчивости [6]. В этих каналах имеет место существенная нелинейность, детальный анализ которой может быть осуществлен моделированием. В статье даны некоторые результаты исследования особенностей решения этой задачи.
Основная особенность раздельных каналов управления состоит в том, что один канал позволяет управлять в широком диапазоне частот, но в малом диапазоне значений, другой канал, наоборот, обеспечивает управление в большом диапазоне значений, но в узкой полосе.
Из этих свойств объекта очевидна постановка задачи: необходим синтез такого регулятора, который бы позволил объединить достоинства каждого канала и компенсировать их недостатки. Эта задача решается методом разделения движений. Особенности такой постановки задачи и ее решения достаточно подробно рассмотрены для линейной модели. Однако практика требует учета существенной нелинейности каждого канала. Действительно, если модель каждого канала брать в линейной форме, то с позиций теории линейных систем зачастую можно усомниться в необходимости применения двух каналов. Имея линейный тракт, можно повысить его быстродействие до нужной величины за счет правильно рассчитанного регулятора и с единственным каналом управления. Расширение полосы частот может быть достигнуто, например, введением дифференцирующего звена.
На практике такой метод не приводит к успеху именно потому, что каждый из двух рассматриваемых каналов содержит существенную нелинейность, и ни к одному из этих каналов нельзя применить методы синтеза линейных систем.
Анализ показал, что основным фактором, сдерживающим быстродействие медленного тракта, является ограничение скорости нарастания выходного сигнала. Основным сдерживающим фактором быстрого тракта является ограничитель уровня выходного сигнала. Учет обоих этих факторов, например, при моделировании, требует применения в качестве «тестовых» сигналов отнюдь не единичного ступенчатого воздействия, а такого воздействия, которое характерно для реальной работы системы. Действительно, в области малых сигналов, к каковым может быть отнесено в ряде случаев и единичное воздействие, оба эти ограничения могут попросту перестать влиять на работу объекта и системы в целом. Детальный анализ и оптимизация нелинейных систем методом моделирования показал, что требуется не только конкретное задание характерных сигналов, но и строго адресное их приложение к объекту в той точке, где они воздействуют на реальный сигнал. Сложившаяся практика приведения помехи к выходу объекта, а шумов ко входу датчика выходной величины для нелинейных объектов оказывается неоправданной, поскольку приводит к некорректным результатам моделирования. Кроме того, важнейшим фактором постановки задачи является установление того, какой именно из трех процессов следует оптимизировать: включение системы (вхождение в равновесный режим), работу системы в равновесном режиме или выключение системы. В нелинейных системах все эти режимы проявляются по-разному. Скажем, для процесса непрерывною производства, который не останавливается в течение нескольких суток, а иногда недель, оптимизация режима включения не столь существенна, как оптимизация режима стабилизации режима технологического производства (равновесного режима со случайными помехами). Если процесс включения осуществляется достаточно часто, и сопровождается расходованием ценного сырья, то до момента достижения требуемого технологического режима установка, по сути, выпускает бракованную продукцию. В этом случае естественно требование оптимизации именно режима включения. В ряде случаев особого внимания требует режим выключения, в том числе аварийного выключения при прекращении поступления какого-либо ресурса. Для таких систем именно этот процесс и следует оптимизировать. Отметим, что даже сама модель объекта в разных режимах может отличаться: до «прогрева» установки она имеет одни параметры, после «профева» — другие, в режиме аварийного отключения возможности управляющих каналов резко ограничиваются, и т. д.
Введение
ограничения на скорость нарастания выходной величины может быть осуществлено при моделировании несколькими способами. Например, пусть модель линейной части объекта имеет в области преобразований Лапласа вид: 
Нелинейная часть задается моделью во временной области:

Для моделирования ограниченной скорости нарастания могут быть применены различные методы.
Уравнение (6.4) может быть записано в виде.

В структуре, реализующей эту модель, имеется сигнал, соответствующий производной выходного сигнала.
Интуитивно кажется правомерным введение ограничителя в этот сигнал, в соответствии со свойствами модели объекта. Однако такая модификации структуры модели далеко не адекватна ограничению скорости нарастания выходной величины.
Введение
ограничителя в контур приводит к нарушению устойчивости этого контура или иным проблемам, не имеющим отношения к реальному объекту.
Другим «интуитивно приемлемым» решением является трехступенчатое уточнение модели, состоящее в вычислении производной (методом дифференцирования), введение ограничения в тракт производной и интегрирование результата. Но и этот метод оказывается некорректным.
Введение
в тракт дифференцирующего звена обращает в нуль его передаточную функцию, но нулевым частотам, и никакое интегрирование, введенное после этого, не восстанавливает исходное значение этой передаточной функции в этой области, поскольку получается неопределенность вида Охоо.
Целесообразным видится применение метода, основанного на вычислении производной выходного сигнала, выявлении превышения этой величиной установленных пороговых значений, и включение местных обратных связей, осуществляющих «торможение» модели объекта только в этом случае. Выявление ситуации ограничения следует осуществлять моделью типа «зона насыщения», которая является нелинейностью, дополняющей ограничитель до линейного звена.
По-видимому, наиболее корректным методом моделирования ограничения скорости нарастания выходного сигнала является структура с контуром обратной связи, показанная на рис. 6.20. Коэффициент К подбирается для обеспечения соответствия между моделью и объектом.
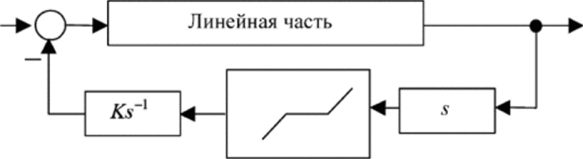
Рис. 6.20. Метод ограничения скорости нарастания выходного сигнала при моделировании медленного тракта объекта.
Из постановки задачи следует, что высокочастотная часть тракта должна обеспечиваться быстрым каналом, а низкочастотная — медленным. Исходя из этого, можно утверждать, что в медленном канале дифференцирующий тракт, вероятнее всего, не требуется, так же, как и не требуется интегрирующий тракт в быстром канале. Это в случае ПИД-регулятора позволяет сократить количество искомых параметров настройки с шести до четырех.
Естественный путь оптимизации видится в применении, например, интегральных критериев качества [4]. Как сказано выше, при оптимизации требуется применение именно тех видов сигналов, которые будут иметь место в реальной системе. Необходимость применения двух трактов предполагает наличие одновременно двух компонент в возмущении (или в задании), а именно: высокочастотной компоненты с небольшой амплитудой и низкочастотной компоненты с большой амплитудой.
Попытка организации такою сигнала и оптимизации регулятора по интегральному критерию качества не приводит к успеху.
Если учесть, что медленный тракт предназначен для отработки медленных помех и заданий с большой амплитудой, а быстрый — для отработки быстрых малых помех и заданий, можно предложить следующий многоэтапный метод оптимизации (в простейшем случае он содержит два этапа).
На первом этапе в модель вводится только малая широкополосная компонента ожидаемого сигнала (помехи или задания) и осуществляется оптимизация быстрого тракта. Коэффициенты регулятора в контуре медленного тракта при этом равны нулю.
На втором этапе в модель вводится только большая узкополосная компонента ожидаемого сигнала и осуществляется оптимизация медленного тракта. Коэффициенты регулятора быстрого тракта при этом фиксируются на уровне достигнутых ранее оптимальных значений.
Полученные коэффициенты регулятора медленного тракта фиксируются, и осуществляется проверка реакции системы на комплексный сигнал, содержащий обе компоненты сигнала. При необходимости осуществляется возврат к первому этапу.
Эффективность предложенного метода подтверждена моделированием на нескольких примерах.