Свободные поперечные колебания отдельного стержня с распределенной массой
Раскрытие этого определителя приводит к трансцендентному уравнению относительно значений к. Так как при расчете систем с распределенной массой число корней трансцендентного уравнения стремится к бесконечности, т. е. практически не ограничено, то нужно тщательно анализировать полученное решение, чтобы не пропустить наименьший корень, соответствующий низшей частоте свободных колебаний. Итак, Так… Читать ещё >
Свободные поперечные колебания отдельного стержня с распределенной массой (реферат, курсовая, диплом, контрольная)
Рассмотрим колебания без учета диссипативных сил и инерции вращения. Будем считать, что частицы масс совершают только перемещения, нормальные к оси прямолинейного стержня. В этом случае упругая кривая оси стержня, как известно, описывается дифференциальным уравнением.

где q — распределенная нагрузка; Е1Х — жесткость стержня (в общем случае переменная).
При свободных колебаниях нагрузка отсутствует. Однако при колебаниях будут возникать распределенные даламберовы силы инерции Jk = -т (х)у (х, t) (так как масса распределенная). Подставим в уравнение (3.1) это значение силы, играющее как бы роль нагрузки. Одновременно учтем, что при колебаниях перемещения будут зависеть не только от х, но и от времени ?, поэтому введем частные производные. Дальнейший вывод сделаем для прямолинейных стержней постоянного сечения и с равномерно распределенной массой т на единицу длины. В результате уравнение (3.1) примет вид.

Ограничимся отысканием только таких решений дифференциального уравнения (3.2), для которых форма изгиба не зависит от времени. Этим решениям, как и в системах с конечным числом степеней свободы, соответствуют главные формы колебаний. Для такой формы колебаний решение дифференциального уравнения может быть представлено в виде произведения двух функций, каждая из которых зависит от одного переменного:
у (х, 0 = y (x)f (!:).
Подставим это значение в уравнение (3.2):

Поделим обе части этого уравнения на произведение my (x)f (t):

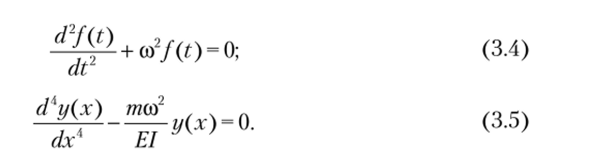
В результате такой операции пришли к разделению переменных. В левую часть входит переменная х, а в правую — переменная t. Равенство (3.3) возможно при любых значениях хи t только в том случае, если левая и правая части являются постоянными величинами, равными друг другу. Обозначим эту величину через со2 и приравняем ее к левой и правой частям уравнения (3.3). В итоге получим два обыкновенных дифференциальных уравнения Уравнение (3.4) совпадает с уравнением (1.5) для системы с одной степенью свободы и, следовательно, имеет то же самое решение. Запишем его в форме (1.15), т. е. 
Решение (3.6) дает только закон изменения амплитуд колебаний во времени. Оно указывает, что главным формам колебаний будут соответствовать простые гармонические колебания. Но оно не позволяет определить частоты свободных колебаний.
С целью определения частот свободных колебаний рассмотрим уравнение (3.5).

С новым обозначением уравнение (3.5) примет вид.

Решение уравнения будем искать в виде у = esx.
Характеристическое уравнение имеет своими корнями следующие значения: s, = k, s2 = -k, s3 = ik, sA = -ik, где i = ->/—1;
Соответствепно полученным корням общее решение однородного уравнения (3.8) после замены екх и е ь через гиперболические функции, а е'кх и е 'кх — через тригонометрические функции с помощью формулы Эйлера (1.7) получит вид 
Для удобства вычислений введем новые произвольные постоянные:

Тогда старые постоянные через новые выразятся следующим образом:

Подставим эти значения в (3.9) и сделаем приведение подобных членов. Тогда.

В формуле (3.10) коэффициенты имеют следующие значения:

Функции (3.11) впервые были введены академиком А. Н. Крыловым и носят его имя. Для удобства вычислений функции (3.11) табулированы. Таблицы приводятся в учебниках по строительной механике [7]. Между функциями существует следующая дифференциальная зависимость: Al, = kDk-В'ь. = кЛь- С'ь = kBk- D'kx = kCk,
Запишем решение через начальные параметры. С этой целью путем дифференцирования получим выражения для углов поворота, изгибающих моментов и поперечных сил: 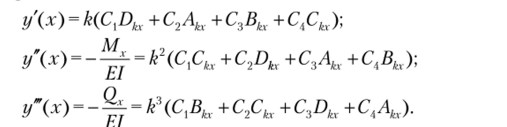
Введем обозначения для начальных параметров при х = 0:

Так как при х = О Аю= 1, Вю = Ск0 = Dk0 = О, то из приведенных выше выражений определим произвольные постоянные:

Подставим значения произвольных постоянных в выражения для прогиба, угла поворота, изгибающего момента, поперечной силы и все выражения умножим на EI. Окончательно получим.
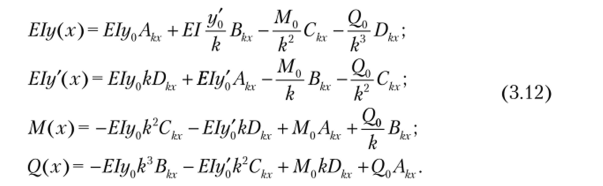
Определение частот свободных колебаний с помощью выражений (3.12) проследим на конкретном примере. Рассмотрим однопролетную шарнирно опертую балку. Из-за наличия шарниров на левом конце (в начале координат) у0 = 0 и М0= 0. Вследствие этого в выражениях (3.12) члены с этими множителями будут равны нулю, и они дальше не выписываются. При заданных граничных условиях на правой опоре у, и М{гоже будут равны нулю. Чтобы определить частоты свободных колебаний, запишем выражения для у, и М/ при х = I (первое и третье выражения из (3.12)) и приравняем их к нулю: 
В результате получили систему однородных уравнений относительно начальных параметров у'0 и QТривиальное решение системы уравнений при у'0 = Q, = 0 свидетельствует об отсутствии колебаний. Колебания будут при у'0 # 0 и Qo Ф 0. В этом случае должен быть равен нулю определитель из коэффициентов при неизвестных:
Раскрытие этого определителя приводит к трансцендентному уравнению относительно значений к. Так как при расчете систем с распределенной массой число корней трансцендентного уравнения стремится к бесконечности, т. е. практически не ограничено, то нужно тщательно анализировать полученное решение, чтобы не пропустить наименьший корень, соответствующий низшей частоте свободных колебаний. Итак, Так как множитель перед скобкой не равен нулю, то В, — D, = 0, откуда следует, что Вы = Dkl.

Подставим в равенство из (3.11) значения приведенных величин при х = /:

После приведения подобных членов получим окончательное выражение.
sin Ш = 0 для определения параметра к, откуда кп = —, где п = 1, 2, 3,… Далее с помощью выражения (3.7) определяется частота свободных колеба;
" /771 тП (?>1 п2к2 [Ш Т1, ,.
нии: — = *—-, откуда сог ( = —. Низшая частота будет при п = 1, т. е.
/ V El I V т
= 7 Г Ш
®min, 2 /.
/ V т
Аналогично определяются частоты при других граничных условиях. Ниже без вывода, как справочный материал, приводятся выражения раскрытых определителей для вычисления параметров k и их минимальные значения для трех наиболее часто встречающихся граничных условий (табл. 3.1). Частота определяется из выражения (3.7):
Таблица 3.1.
Критические параметры для различных граничных условий балки.
Левый конец. | Правый конец. | Определитель. | Параметр k |
Защемлен. | Свободный. | chkl cos И = -1. | 1,875. |
Защемлен. | Шарнирный. | tgW-thW. | 3,927. |
Защемлен. | Защемлен. | eh kl cos k! = 1. | 4,730. |
Содержание этого параграфа можно рассматривать как справочный материал. Непосредственный расчет рам с распределенной массой при наличии программ, реализующих метод конечных элементов, становится нерациональным.