Имитационное моделирование структуры электропривода переменного тока с векторным управлением
Основная цель данных исследований убедиться в том, что спроектированные контуры в условиях действия внутренних возмущений, связанных с работой двигателя, выполняют функции стабилизации тока: заданные токи по осям х и у не зависят от поступающих возмущений. На рис. 4.55 и 4.56 продемонстрированы переходные режимы пуска-реверса двигателя на частоты вращения ±50 1/с с чередованием реактивной… Читать ещё >
Имитационное моделирование структуры электропривода переменного тока с векторным управлением (реферат, курсовая, диплом, контрольная)
Моделирование в Simulink
Теоретическая часть, связанная с математическим описанием асинхронного двигателя в режиме векторного управления и разработкой структуры, представлена в подразделе 4.2. Используем структуру, представленную на рис. 4.2, для реализации модели асинхронного двигателя AKZ в схеме на рис. 4.51.

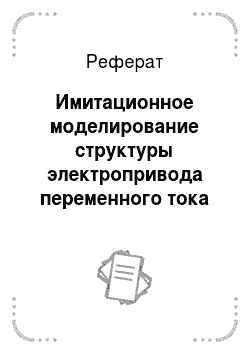
Рис. 4.51. Схема модели электропривода с векторным управлением (инвертор с широтно-импульсным управлением) (Fig4_5J)
Схемы моделей, показанных на рис. 4.51 и 4.52, содержат контуры тока, потока и скорости с теми параметрами, которые были определены при оптимизации и исследованиях в подразделах 4.3−4.5.
Основная цель данных исследований убедиться в том, что спроектированные контуры в условиях действия внутренних возмущений, связанных с работой двигателя, выполняют функции стабилизации тока: заданные токи по осям х и у не зависят от поступающих возмущений.
Задание частоты вращения осуществляется блоком Discrete Timer путём подачи напряжения от 0,01 В до 10 В различной полярности. Управление частотой вращения двигателя начинается после окончания переходного процесса в контуре потока через 0,02 с. В соответствии с выбранным коэффициентом обратной связи по скорости задающему напряжению 10 В соответствует частота вращения 100 1/с.
Задание нагрузки производится блоком Discrete Timer1 в натуральных единицах (Нм), так как модель вычисляет электромагнитный момент в Нм. Характер момента определяется индексом входа: TL — реактивный момент сопротивления. Та — активный.
Магнитный поток задаётся блоком Flux и задан значением 8 В, что соответствует, при выбранном коэффициенте обратной связи, 0,8 Вб.
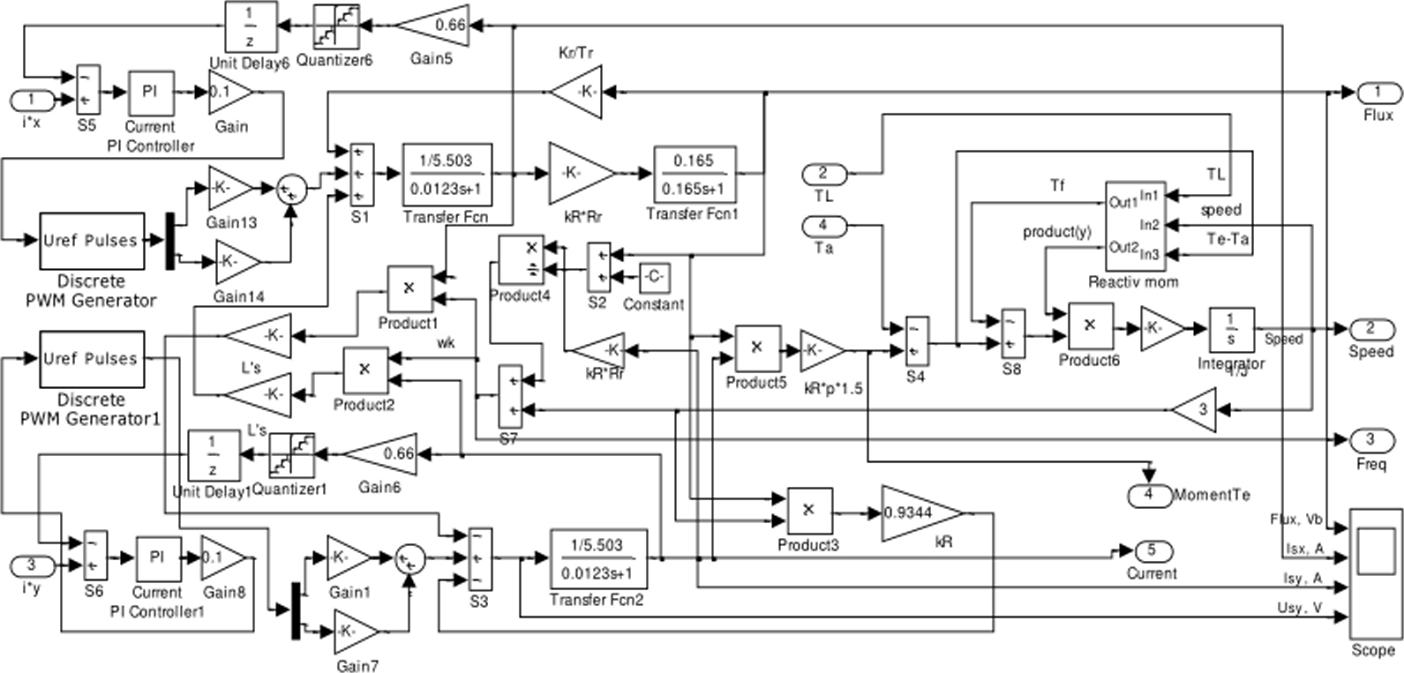
Рис. 4.52. Схема модели структуры асинхронного двигателя при векторном управлении
с широтно-импульсным управлением инвертора
Проведём исследование привода на минимальной частоте вращения с воздействием реактивного момента сопротивления номинального значения 7,66 Нм. Результаты моделирования представлены на рис. 4.53 и 4.54. Различие в результатах на рис. 4.53 и 4.54 в очерёдности наложения и сброса нагрузки.
Выводы:
- — поток сохраняет заданное значение при воздействии возмущений со стороны работающего двигателя;
- — двигатель пускается и реверсируется с нагрузкой и без неё. развивая среднюю скорость ±0,1 1/с. При сбросе нагрузки привод развивает скорость 1,307 1/с, которая восстанавливается за время менее 0,02 с. При увеличении нагрузки скорость падает до нулевого уровня и восстанавливается за время около 0,03 с. Время реверса под нагрузкой сравнительно большое 0,07 с;
- — пульсации потока заметно не проявляются в связи с большой постоянной в контуре потока;
- — пульсации момента около 3-х Нм, пульсации частоты вращения заметны, но их можно не учитывать;
- — все задания отработаны чётко.
На рис. 4.55 и 4.56 продемонстрированы переходные режимы пуска-реверса двигателя на частоты вращения ±50 1/с с чередованием реактивной нагрузки в 7,66 Нм с холостым ходом, полученные в результате моделирования структуры, представленной на рис. 4.51.
Анализ результатов моделирования позволяет сделать выводы:
- — двигатель чётко пускается и реверсируется под нагрузкой и без неё. Последствия возмущений по нагрузке ±1,2 1/с отрабатываются полностью;
- — возмущения, поступающие в контур тока Isy нс отрабатываются полностью регулятором тока. Следствием этого является непостоянство пускового момента, а следовательно пускового тока. На рис. 4.56 при реверсе пусковой момент изменяется от минус 52,28 Нм до минус 48,8 Нм. Таким образом, при реализации инвертора с широтно-импульсной модуляцией контур тока по оси v полностью своих функций не выполняет;
- — контур потока внутренние возмущения отрабатывает полностью;
- — однако, нс смотря на указанные замечания, электропривод можно эксплуатировать, так как частота вращения отрабатывается без погрешностей;
- — следует отметить, что полученные переходные характеристики при «большом» управлении достигнуты в результате подбора уровней ограничения интеграторов всех регуляторов. Уровень ограничения подбирался при максимальном возмущении по нагрузке 7,66 Нм. Что бы убедиться в правоте этих утверждений, необходимо провести моделирование с уровнями ограничения интеграторов ±10 В.
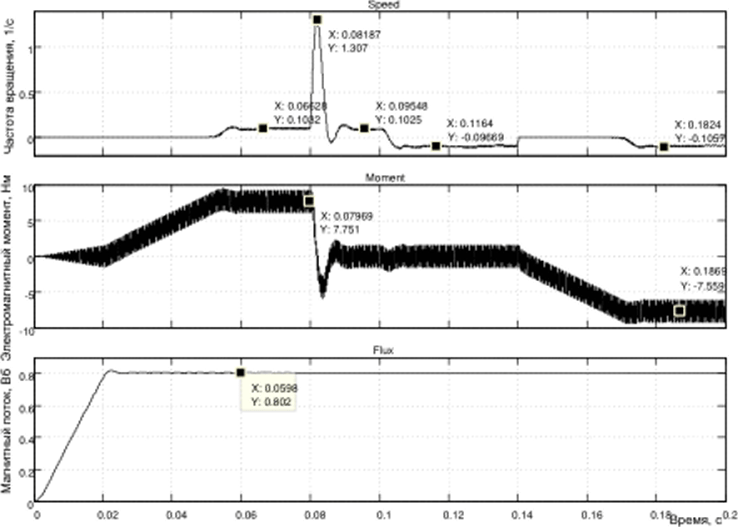
Рис. 4.53. Результаты моделирования пуска-реверса на 0,1 1/с с учётом внутренних возмущений, поступающих на контуры токов
Spe^d.

Рис. 4.54. Результаты моделирования пуска-реверса на О, 1 1/с с учётом внутренних возмущений, поступающих па контуры токов
Рис. 4.55. Результаты моделирования пуска-реверса на 50 1/с учётом внутренних возмущений, поступающих на контуры токов
rs.
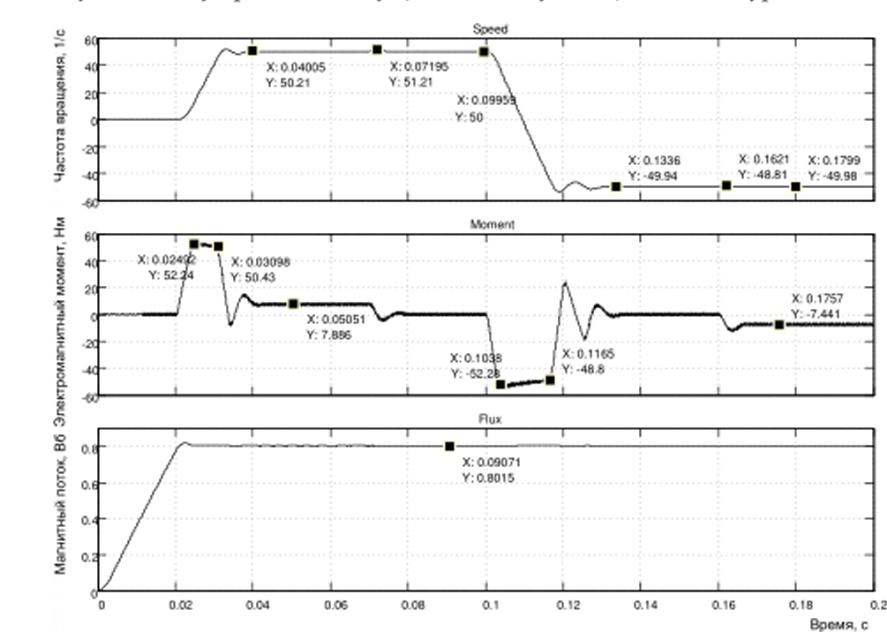
Рис. 4.56. Результаты моделирования пуска-реверса на 50 1/с с учётом внутренних возмущений, поступающих на контуры токов

Рис. 4.57. Результаты моделирования пуска-реверса на 100 1/с с учётом внутренних возмущений, поступающих на контуры токов

Время, с.
Рис. 4.58. Результаты моделирования пуска-реверса на 100 1/с с учётом внутренних возмущений, поступающих на контуры токов
Для демонстрации работоспособности привода при задании скорости ±100 1/с проведено моделирование при задающем воздействии ±10 В. Результаты моделирования представлены на рис. 4.57, 4.58.
В заключение исследования влияния внутренних возмущений на контуры токов и реализации инвертора с широтно-импуьсным управлением делаем вывод о пригодности разработанной структуры для реализации электропривода.