Сопротивление среды движению судов на воздушной подушке
Волновое сопротивление объясняется наличием под днищем СВП области повышенного давления, которая, перемещаясь вместе с судном, деформирует поверхность и вызывает вертикальные колебания воды. Максимум волнового сопротивления имеет место в переходном режиме, с ростом скорости оно убывает и в расчетном режиме движения СВП практически отсутствует. Характерный горб на кривой сопротивления своим… Читать ещё >
Сопротивление среды движению судов на воздушной подушке (реферат, курсовая, диплом, контрольная)
В отличие от всех остальных судов у СВП отсутствует режим плавания. Сила поддержания у них создается за счет повышенного давления в воздушной подушке (ВП) — пространстве между днищем и поверхностью воды. Это давление однозначно определяется площадью 5п ВП и силой тяжести судна:

Для создания необходимого давления в подушке в нее непрерывно нагнетается воздух. Мощность предназначенного для этой цели вентилятора.

где ре = kpn— напор вентилятора (k > 1 — коэффициент, учитывающий потери напора в системе подачи воздуха); Q — расход воздуха; Т|в— КПД вентилятора.
Отсюда очевидна еще одна особенность СВП — даже без хода, в так называемом режиме парения, затрачивается энергия на поддержание ВП. Для современных СВП можно считатьрп *? f (v), а следовательно и мощность вентилятора остается практически неизменной на всех режимах движения.
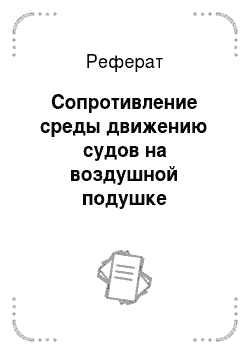
Все мореходные качества СВП, а в первую очередь ходкость, определяются типом судна. СВП с полным отрывом от поверхности или амфибийные (СВПА) не имеют контакта с водой как в режиме парения, так и на ходу. Воздух истекает из ВП по всему ее периметру, расход его относительно велик, велика и мощность вентилятора. Скеговые СВП (СВПС) имеют постоянно погруженные в воду узкие боковые корпуса — скеги, препятствующие истечению воздуха из подушки по бортам судна. Соответственно снижаются по сравнению с СВПА затраты мощности на поддержание ВП. Приведенные на рис. 3.27 схемы иллюстрируют указанные особенности СВП различных типов.
Для обеспечения при умеренных расходах воздуха требуемой мореходности по контуру ВП устанавливается гибкое ограждение (ГО), способное подгибаться при прохождении судна над волной. В полном соответствии со своим названием СВПА могут выходить на берег и передвигаться по суше, наличие ГО позволяет им преодолевать препятствия.
В связи с отсутствием режима плавания у СВП выделяют только два режима — переходный и расчетный. Это деление тоже в достаточной степени условное — по аналогии с СПК считают, что расчетный режим начинается за горбом сопротивления.
Рис. 3.27. Схемы СВПА (я) и СВПС (6): 1 — гибкое ограждение; 2 — скег Для обоих типов СВП сопротивление можно записать в виде.

где Яц" Rr, Rr RM — соответственно волновое, остаточное, импульсное и воздушное сопротивление.
Точному определению в (3.86) поддаегся только импульсное сопротивление.

где рл — плотность воздуха.
Физическая суть этой составляющей: затраты энергии на ежесекундный отбор из окружающей среды необходимого объема воздуха Qh придание ему скорости v, равной скорости движения СВП.
Волновое сопротивление объясняется наличием под днищем СВП области повышенного давления, которая, перемещаясь вместе с судном, деформирует поверхность и вызывает вертикальные колебания воды. Максимум волнового сопротивления имеет место в переходном режиме, с ростом скорости оно убывает и в расчетном режиме движения СВП практически отсутствует. Характерный горб на кривой сопротивления своим появлением обязан именно волновому сопротивлению.
Остаточное сопротивление включает ряд составляющих различной природы. Это сопротивление от замыва гибкого ограждения, брызговое, сопротивление взаимодействия внешнего потока с ВП. Для СВИС в их число часто включают и гидродинамическое сопротивление скегов.
В зависимости от типа СВП изменяется и роль отдельных составляющих в общем балансе сопротивления. Различно и соотношение энергетических затрат на создание воздушной подушки Рв и на движение PF Так, у СВПА величина (PJPS) значительно больше, чем у СВПС.
Удельное сопротивление СВП меньше, чем у других СДП (см. рис. 3.24), однако суммарные энергетические затраты на движение имеют один порядок. Это объясняется необходимостью поддержания ВП.