Свободные колебания.
Динамика и устойчивость сооружений
Рис. 2.2. Система с несколькими степенями свободы боды. Если эту систему вывести из состояния равновесия, то она будет совершать свободные колебания. При этом, как и в системе с одной степенью свободы, каждый участок с массой будет находиться под действием двух сил: упругого сопротивления 5. и силы инерции Jf. Но в данном случае задача сложнее в связи с тем, что перемещения масс являются взаимно… Читать ещё >
Свободные колебания. Динамика и устойчивость сооружений (реферат, курсовая, диплом, контрольная)
Рассмотрим балку, распределенную массу которой сосредоточим в п сечениях mv mv …, тп (рис. 2.2).
При принятых допущениях положение каждой массы определяется одним параметром уг поэтому рассматриваемая система имеет п степеней сво;
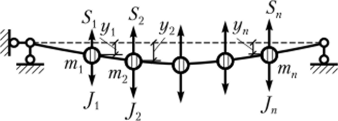
Рис. 2.2. Система с несколькими степенями свободы боды. Если эту систему вывести из состояния равновесия, то она будет совершать свободные колебания. При этом, как и в системе с одной степенью свободы, каждый участок с массой будет находиться под действием двух сил: упругого сопротивления 5. и силы инерции Jf. Но в данном случае задача сложнее в связи с тем, что перемещения масс являются взаимно зависимыми. Поэтому выражение для прогиба типа (1.3) на основании принципа независимости действия сил, например, для массы тх будет уже многочленным:

Совершенно очевидно, что такие же выражения будут и для других масс. Общее число таких выражений равно числу степеней свободы п. В формуле (2.1) коэффициенты податливости Ък] представляют собой перемещения по направлению колебания масс в заданной системе. Если система статически неопределимая, то для определения коэффициентов следует использовать один из методов расчета статически неопределимых систем.
Подставим в уравнения типа (2.1) силы инерции, определяемые выражением (Д.4), и перенесем все члены влево:

В результате получили однородные дифференциальные уравнения, описывающие свободные колебания упругой конструкции с п степенями свободы.
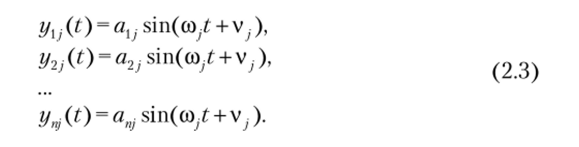
Уравнения (2.2) имеют п частных решений. Запишем одно из них для частоты j в виде (1.15):
Вторые производные по времени от этих выражений примут вид.
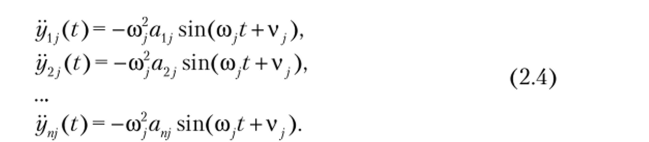
Подставим значения (2.3) и (2.4) в уравнения (2.2) и сделаем приведение подобных членов. Каждый член имеет множитель sin ((o? + v.). Поскольку решение справедливо для любого момента времени, то возьмем тот момент времени, когда sin (a>? + v;) = 1. В результате придем к однородной системе алгебраических уравнений относительно амплитуд akj (Л = 1,2,…, п):
Известно, что однородные уравнения (без свободных членов) имеют два решения. Одно из них тривиальное, когда все амплитуды akj = 0. Но оно не представляет интереса, так как в этом случае колебания отсутствуют. Отличные от нуля значения амплитуд возможны тогда, когда определитель из коэффициентов при aki равен нулю, т. е.

или в матричной форме где Е — единичная матрица [15]. Полученное уравнение называется характеристическим уравнением матрицы коэффициентов А.
Раскрывая определитель в уравнении (2.7), получим уравнение степени п относительно X. Решая это уравнение, найдем п значений X- и, соответственно, п значений частот свободных колебаний из (2.5):

Для краткости записи разделим все уравнения на сои введем обозначение.

В окончательном виде будем иметь.

Берутся только положительные значения квадратного корня (2.9). Некоторые из них могут оказаться одинаковыми. Одинаковые частоты называются кратными. Совокупность всех угловых частот называется спектром частот рассматриваемой системы. Наименьшая частота из этого спектра называется частотой основного тона. Решение уравнения (2.7) легко получить лишь для п < 3. Для решения уравнений более высокого порядка рекомендуется использовать какую-либо вычислительную систему, например MATLAB.