Забой экскаватора с обратной лопатой и его параметры
Обычно при разработке траншей и выемок ставится также задача планирования дна выемки. Эта работа возможна лишь в пределах видимости машинистом планируемого участка на глубине или Н2 (рис. 3.28). При заданных наименьшем и наибольшем радиусах копания на уровне стоянки экскаватора, заданной крутизне откоса определяется из треугольника OSKy. Между уровнем стоянки экскаватора и зубьями ковша при… Читать ещё >
Забой экскаватора с обратной лопатой и его параметры (реферат, курсовая, диплом, контрольная)
Основные параметры забоя экскаватора, оборудованного обратной лопатой, приведены на рис. 3.26.
Радиус габаритной установки Rq, необходимый для обеспечения возможности свободной обработки откоса выемки снизу доверху:

где А) Б — габаритные длина и ширина движителя экскаватора.
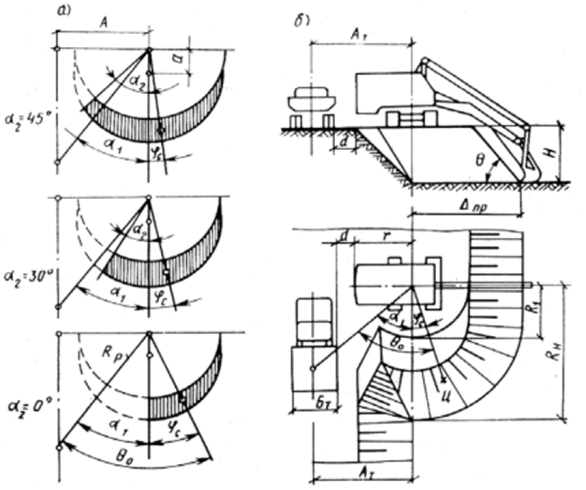
Рис. 3.26. Технологические параметры рабочего места обратной лопаты:
а — зависимость 0^ от ширины проходки; б — технологические параметры Наименьший радиус копания на уровне стоянки машины R^ определяется расстоянием между осью вращения экскаватора и местом выхода зубьев ковша из грунта при полностью повернутой к стреле рукояти. Наименьший радиус копания не должен быть меньше R^ +1 м для обеспечения безопасной работы.
Наибольший радиус копания на уровне стоянки R^ определяется расстоянием между осью вращения экскаватора и зубьями ковша, установленными на поверхности стоянки экскаватора при наибольшем угле поворота рукояти относительно стрелы.
Радиус копания на заданной глубине /? зависит от глубины разра;
н ботки. Чем больше глубина разработки, тем меньше величина радиуса копания на заданной глубине.
Наибольшая глубина копания Н , определяется расстоянием.
max.
между уровнем стоянки экскаватора и зубьями ковша при наибольшем возможном наклоне стрелы вниз. Наибольшая глубина копания (рис. 3.27,.
а) при заданных наименьшем и наибольшем радиусах копания на уровне стоянки экскаватора, заданной крутизне откоса определяется из треугольника OSKy
откуда.

Корни этого уравнения.
где Г = 1+^2(9О*-0); F = 2y+2(Rrz0)tg (90°-e)y,
M=(R, —Zo)2-(«2-z»)2.
После выработки грунта из контура стоянки 1 -I экскаватор перемещается в направлении, показанном стрелкой (рис. 3.27, я), и с новой стоянки IIII (рис. 3.27, б) может разрабатывать грунт на соотвстсгвуюшую глубину. При этом контур разработки будет К^К^К^К^.
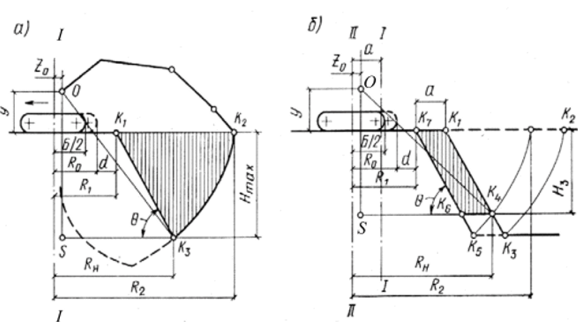
Рис. 3.27. Определение параметров глубины при разработке выемок обратной лопатой:
а — при определении наибольшей глубины копания; б — при определении глубины разработки с планировкой дна выемки Для обеспечения ровной поверхности дна выемки глубину разработки необходимо уменьшить. Глубина выемки с ровным основанием зависит от крутизны откоса и передвижки и определяется из треугольника OSK4.
Так как.
глубина разработки Н^ определяется из выражения.

где T^+tg2(99‘-в) — Fx=2y+2(i?, ~Zq+a)tg (90° — в); Mr(Rrz0+a)2-(R2-z0)2.
Обычно при разработке траншей и выемок ставится также задача планирования дна выемки. Эта работа возможна лишь в пределах видимости машинистом планируемого участка на глубине или Н2 (рис. 3.28).
Передвижкой называется процесс передвижения экскаватора на рабочем месте после выработки определенного объема грунта. При работе обратной лопатой передвижка зависит от требуемой глубины разработки: чем меньше глубина разработки, тем больше может быть передвижка.
Средний угол поворота на выгрузку в^ зависит ог радиуса разгруз;
ки, допустимого расстояния от оси хода экскаватора до оси землевозной дороги и ширины проходки (рис. 3.26, а).
Для сокращения продолжительности цикла целесообразно вести работу широкими проходками. Ширина проходки для экскаваторов с обратной лопатой определяется так же, как для экскаваторов с прямой лопатой. Наибольшая ширина боковой проходки с погрузкой грунта в самосвалы назначается с учетом получения наименьшего среднего угла поворота на выгрузку (рис. 3.26, а).
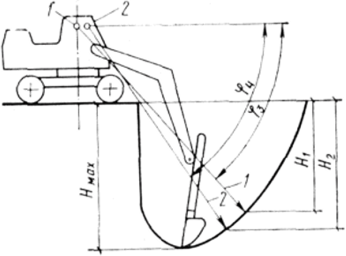
Рис. 3.28. Схема для определения зонывидимости дна при разработке выемки обратной лопатой:
1 — туловище машиниста в вертикальном положении; 2 — туловище наклонено вперед.
Радиус разгрузки R определяется как расстояние между осью поворота экскаватора до режущей кромки ковша в тот момент, когда из него начинает высыпаться грунт. На экскаваторах с механическим приводом, где ковш жестко соединен с рукоятью, высыпание грунта из ковша осуществляется на определенном пути при повороте рукояти. Для механических экскаваторов различают начальный и конечный радиусы разгрузки.
Для гидравлических экскаваторов из-за независимого поворота ковша относительно рукояти разгрузка ковша возможна при различных положениях стрелы и рукояти. Для этих экскаваторов различают ближнее и дальнее места разфузки: в первом случае разгрузка осуществляется с большой высоты, во втором случае высота разгрузки меньше, но радиус разгрузки больше.