Разработка структуры асинхронного двигателя в Simulink
На рис. 1.72 показано управление двигателем путём подачи двухфазного напряжения на обмотку статора. Реверс осуществляется изменением порядка чередования фаз с помощью переключателя Switch, настроенного на определённое время. Синусоидальные напряжения в относительных единицах подаются на преобразователь координат, модель которого взята из файла Figl46, преобразуются в соответствии с выбранным… Читать ещё >
Разработка структуры асинхронного двигателя в Simulink (реферат, курсовая, диплом, контрольная)
Схема асинхронной машины с короткозамкнутым ротором (АКЗ) получается из обобщённой схемы (рис. 1.50), если обмотки ротора замкнуть накоротко. При этом в общих уравнениях (1.38) следует положить UR = 0:
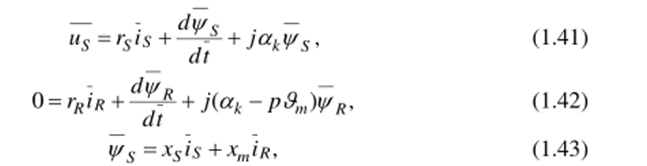

Для анализа динамических свойств двигателя необходимо учитывать переходные электромагнитные процессы в машине. Примем в качестве пары переменных, описывающих поведение машины в переходных режимах, пространственные векторы тока статора и потокосцепления ротора (is*yfRh Приведем ход преобразований, приводящий к конечному результату.
Подставим в уравнение (1.41) выражение (1.43):
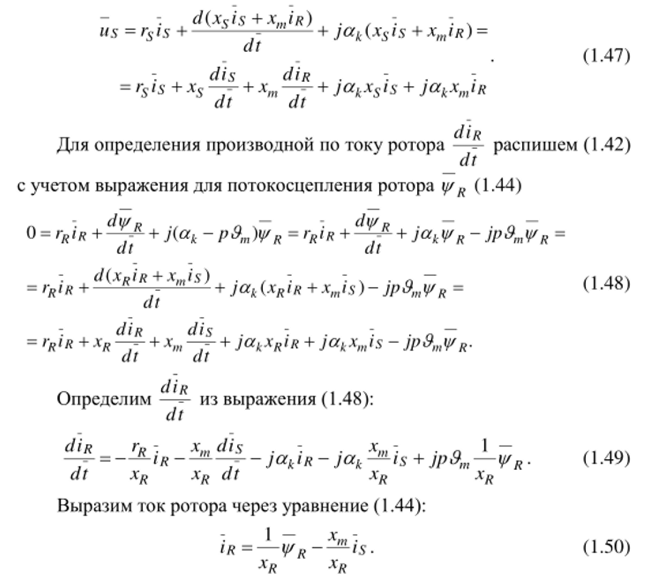
Подставим (1.50) в (1.49) и помножим на хт в соответствии с уравнением (1.47):
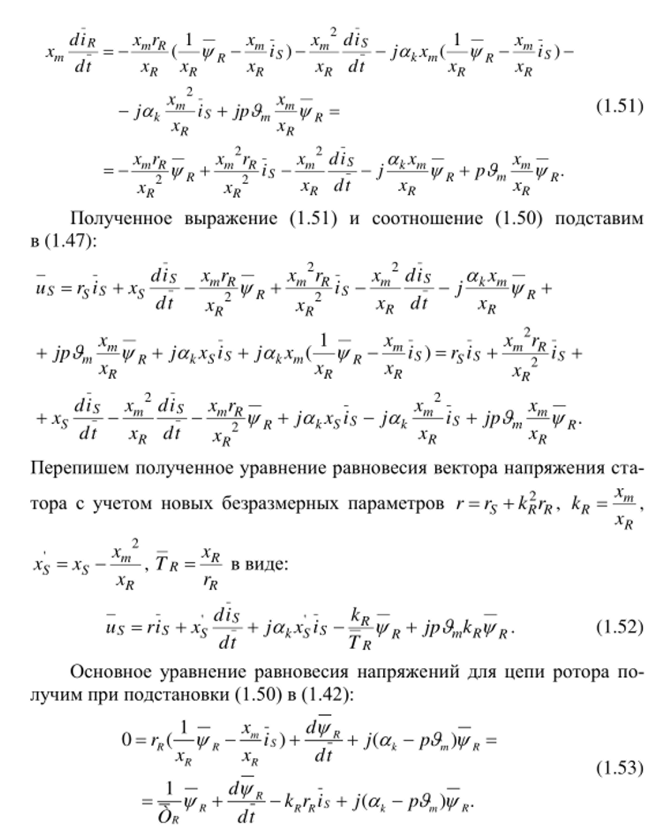
Раскроем смысл выражения (1.45) для момента. Из литературы следует, что при выбранной парс переменных состояния y/s, is выражения для момента в относительных единицах имеет вид при к = 1 [3]:

Кроме того, векторное произведение можно представить в виде определителя, выраженного через составляющие векторов в неподвижной системе координат и единичные орты пространственной системы координат:

Полученная формула совпадает с выражением для момента и указывает, что момент направлен вдоль орта к (вдоль оси вала двигателя).
Выведем выражение для момента с учетом выбранной пары векторов переменных состояния асинхронного двигателя y/Rtis• Сделаем подстановку в (1.43) выражения (1.50): 
Распишем (1.55) через составляющие по осям а, р:

Выражения (1.56) подставим в (1.54):

По структуре выражение (1.57) совпадает с (1.45) при.

Уравнения (1.41)—(1.46) после соответствующих преобразований принимают вид:
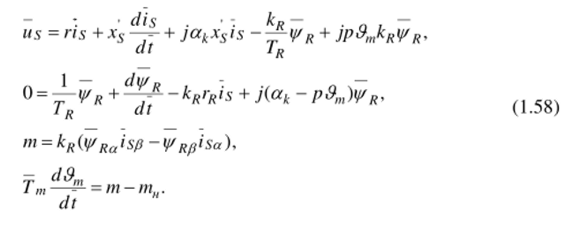
Отметим, что при переходе к двум переменным состояния число уравнений, описывающих электромагнитные и электромеханические процессы в асинхронном двигателе, сократилось до четырех (1.58).
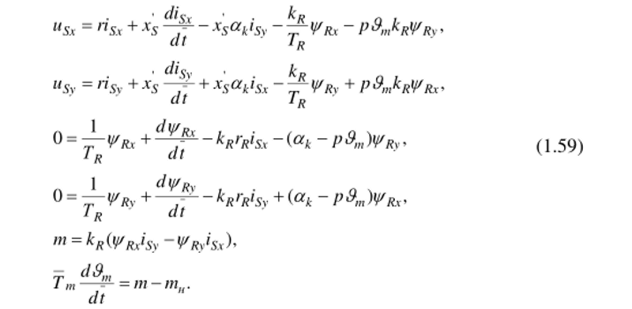
Разработаем структуру асинхронного двигателя в относительных единицах.
В произвольной системе координат (сок фО, аКфО) вещественная ось обозначается через д, а мнимая через у. Пространственные векторы в этом случае раскладываются по осям:

Подставив эти значения в уравнения (1.58) и приравняв отдельно вещественные и мнимые части, получим:
Система дифференциальных уравнений первого прядка (1.59) в операторной форме примет вид:
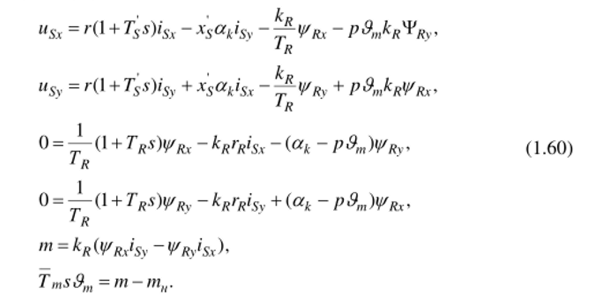
Дополнительно введена постоянная времени Ts= — . Напомним,.
г
что уравнения представлены в безразмерном виде.
Для разработки структуры системы (1.60) представим систему уравнений в следующем виде:
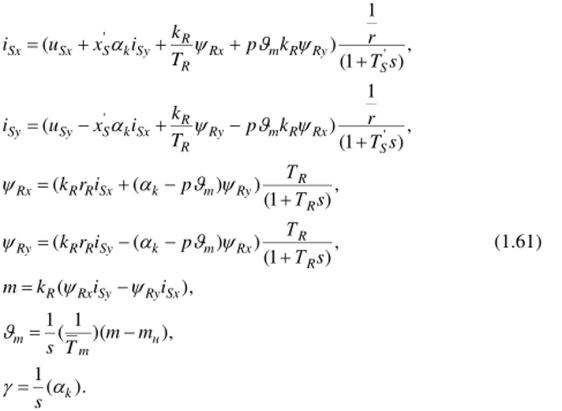
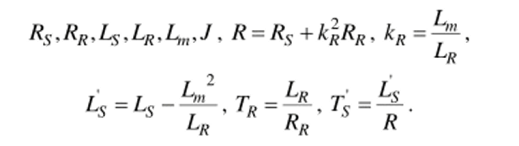
Напомним введённые ранее обозначения:

Системе уравнений (1.61) соответствует структура, представленная на рис. 1.72. Файл Figl72 содержит модель в Simulink, исполняющую решение системы (1.61) в относительной форме.
Система (1.61) записана для двухфазной асинхронной машины в произвольной системе координат. Модель предусматривает возможность работы в неподвижной (Stationary), синхронной (Synchronous) системах, а так же во вращающейся синхронно с ротором (Rotor). Выбор системы координат осуществляется переключателями Manual SwitchI и Manual Switch. На выходе блока Integrator1 формируется текущий угол состояния координаты Gamma, управляющий работой преобразователя координат (Subsystem). Все блоки, связанные с управлением системой координат, выделены желтым цветом.
Блоки, выделенные голубым цветом, моделируют реактивную нагрузку двигателя. Двигатель может работать с реактивной, активной и смешанной нагрузками.
Предусмотрен вывод переменных: тока статора и потокосцепления ротора в трёхфазном виде, для чего использованы преобразователи двухфазного сигнала в трехфазный 2/3. Преобразователи взяты из файла FigJ43.
На рис. 1.72 показано управление двигателем путём подачи двухфазного напряжения на обмотку статора. Реверс осуществляется изменением порядка чередования фаз с помощью переключателя Switch, настроенного на определённое время. Синусоидальные напряжения в относительных единицах подаются на преобразователь координат, модель которого взята из файла Figl46, преобразуются в соответствии с выбранным способом управления координатами и подаются на модель двигателя.
Для моделирования инерционных звеньев первого порядка в каналах тока статора и потокосцеплен ия ротора использован блок передаточной функции Transfer Fen.
Модель, представленная на рис. 1.72, требует ввода параметров двигателя в относительных единицах. Расчет параметров схемы замещения асинхронного двигателя (см. файл Figl51) предусматривает формирование параметров в относительных единицах. Например, для двигателя RA112M4 результаты расчета параметров схемы замещения двигателя представлены на рис. 1.66. Сведём расчётные значения относительных параметров в табл. 1.3.
Таблица 1.3.
Параметры двигателя RA112M4 в о.е.
Параметр | гг | г. | kr | x's | тг | т*. 1 S. | Тт | М,"Нм. |
Величина. | 0,3 599. | 0,5 338. | 0.9718. | 0,1415. | 70,67. | 2,651. | 55,42. | 26,71. |
Базовые параметры двигателя сведены в табл. 1.4.
Таблица 1.4.
Базовые параметры двигателя RA112М4
Параметр | иь, в. | 1ь, А. | Мь, Нм. | ш," о.е. | озь, 1/с. | tb, c. |
Величина. | 310,3. | 12,02. | 35,62. | 0,75. | 314,2. | 1/314,2. |
Указанные параметры в табл. 1.3 введены в модель (Figl72). Время моделирования выбрано 50*pi в о.е., что соответствует 0,5 с действительному времени. Время переключения на реверс — 25*pi о.е.
ос.
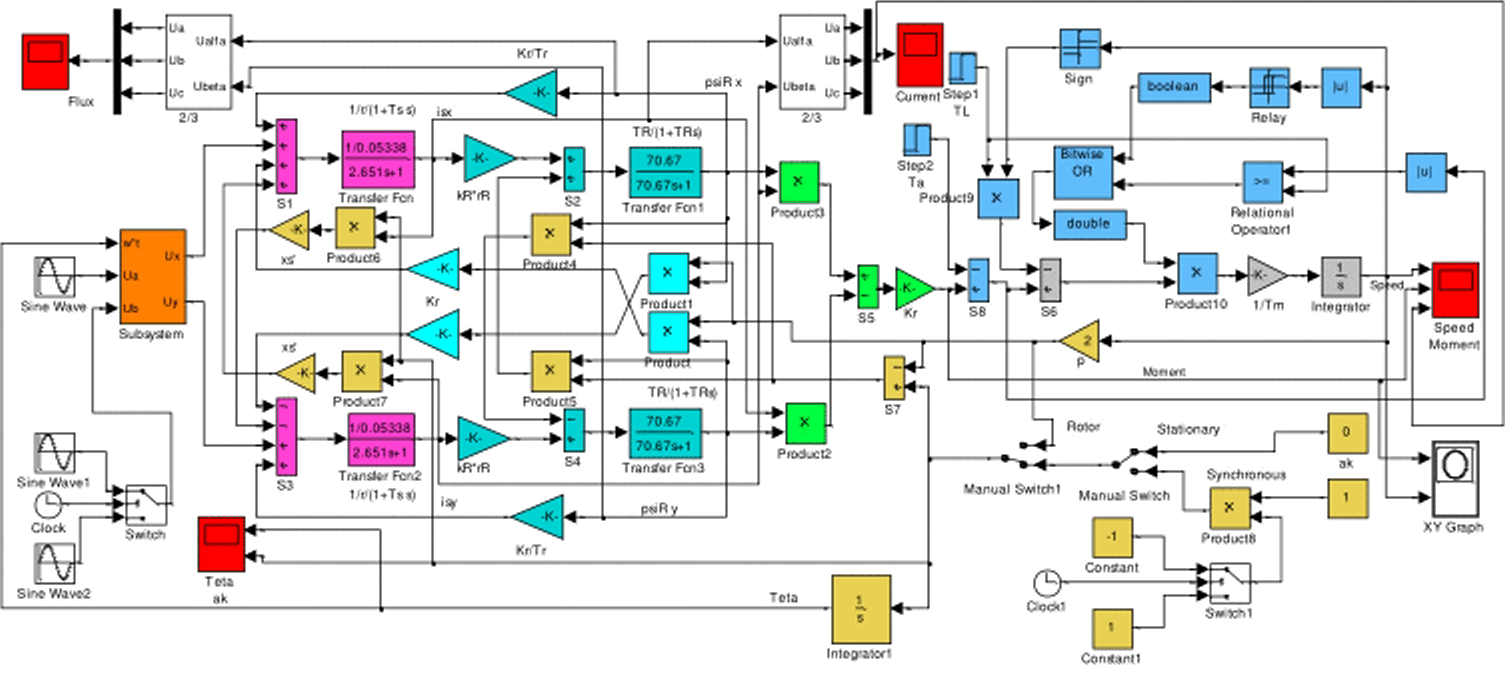
Рис. 1.72. Структура модели асинхронного двигателя в Simulink в относительных единицах (Figl 72)
Момент нагрузки 0,75 о.е. введён по реактивному входу TL. Сум мариый момент инерции принят большим в два раза относительно мо мента инерции двигателя, что соответствует Тт =55,42 о.е.
Настройка амплитуды и частоты напряжений на двигателе показа ны на рис. 1.73.
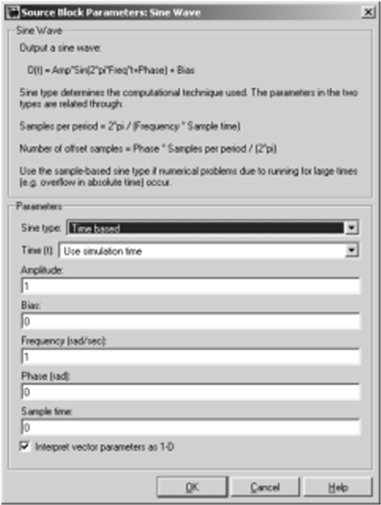
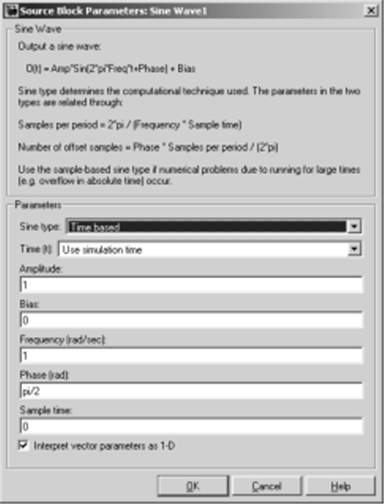
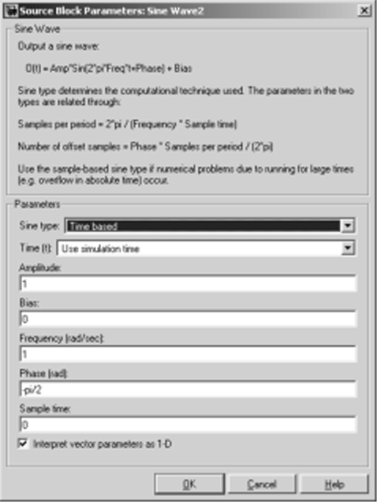
Рис. 1.73. Ввод параметров источников питания двигателя
Результаты моделирования пуска — реверса путём прямого включения в сеть представлены на рис. 1.74.
На рис. 1.75 показана динамическая механическая характеристика, полученная в результате обработки результатов моделирования, представленных на рис. 1.74.

Рис. 1.74. Результаты моделирования пуска — реверса асинхронного двигателя с реактивной нагрузкой, равной номинальному значению
Сравним полученные результаты с результатами, представленными на рис. 1.70. Различие состоит только в масштабах времени. И качественно и количественно эти результаты совпадают, что свидетельствует об идентичности предлагаемой модели и модели, содержащейся в библиотеке SimPowerSystems. Отличие предлагаемой модели состоит в ограничении возможности наблюдать изменение всех возможных переменных состояния двигателя.
Так как предлагаемая модель была спроектирована в двух переменных состояния: ток обмотки статора и потокосцепление ротора, то эти переменные выводятся, а другие переменные в результате преобразований были исключены и следовательно, процесс изменения их во времени наблюдать нельзя.
В этом различие и недостаток этой модели. Однако некоторые возможности расширены. Например, двигатель может работать с реактивной, активной и смешанной нагрузках. Кроме того, в отличие от модели SimPowerSystems, структура доступна для исследований и детального изучения, что, несомненно, является с учебной (или познавательной) точки зрения преимуществом. Следует отмстить, что структура реализована на элементах библиотеки Simulink без привлечения элементов библиотеки SimPowerSystems.
Разработаем структуру двигателя в абсолютных единицах.
Для чего, перепишем систему уравнений (1.61), представленных в относительных единицах, без особых пояснений в абсолютных единицах.
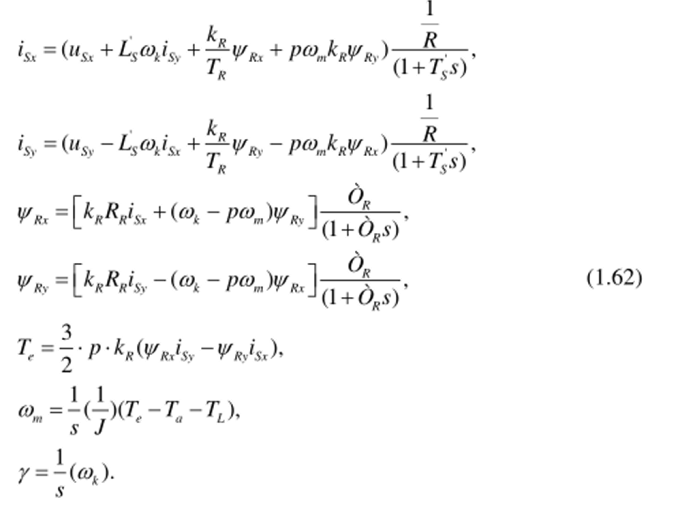
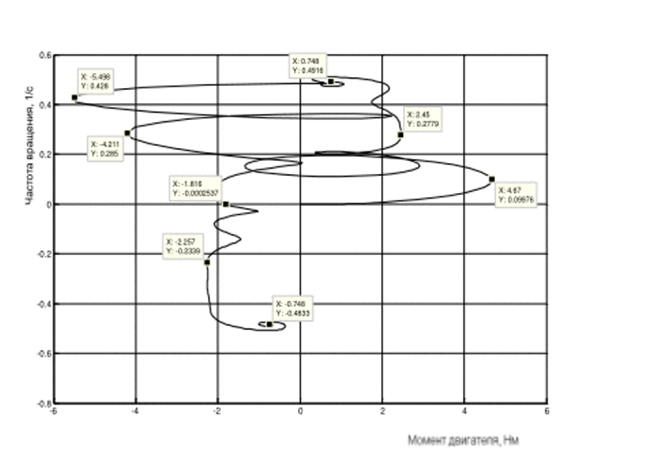
Рис. 1.75. Динамическая механическая характеристика двигателя типа RA112М4
Для полученной системы уравнений (1.62) структура модели не меняется, меняются параметры двигателя, переписанные в абсолютных единицах (рис. 1.76).
Необходимые параметры двигателя RA112M4 в абсолютных единицах рассчитываются в файле Figl51. Для этого вводим справочные данные двигателя из табл. 1.2, запускаем моделирование и сводим полученные расчетные параметры схемы замещения в табл. 1.5.
Базовые параметры данного двигателя приведены в табл. 1.4. Номинальный момент двигателя — 26,71 Нм.
Таблица 1.5.
Параметры схемы замещения двигателя RAl 12М4 в абсолютных единицах
Параметр | Rr. | R. | 1Л. | Tr. | T's | 1/J. | |
Значение. | 0.9289. | 0.9718. | 1,378. | 0,1 163. | 0,225. | 0,8 438. |
Напомним введённые ранее обозначения:
ос ос.
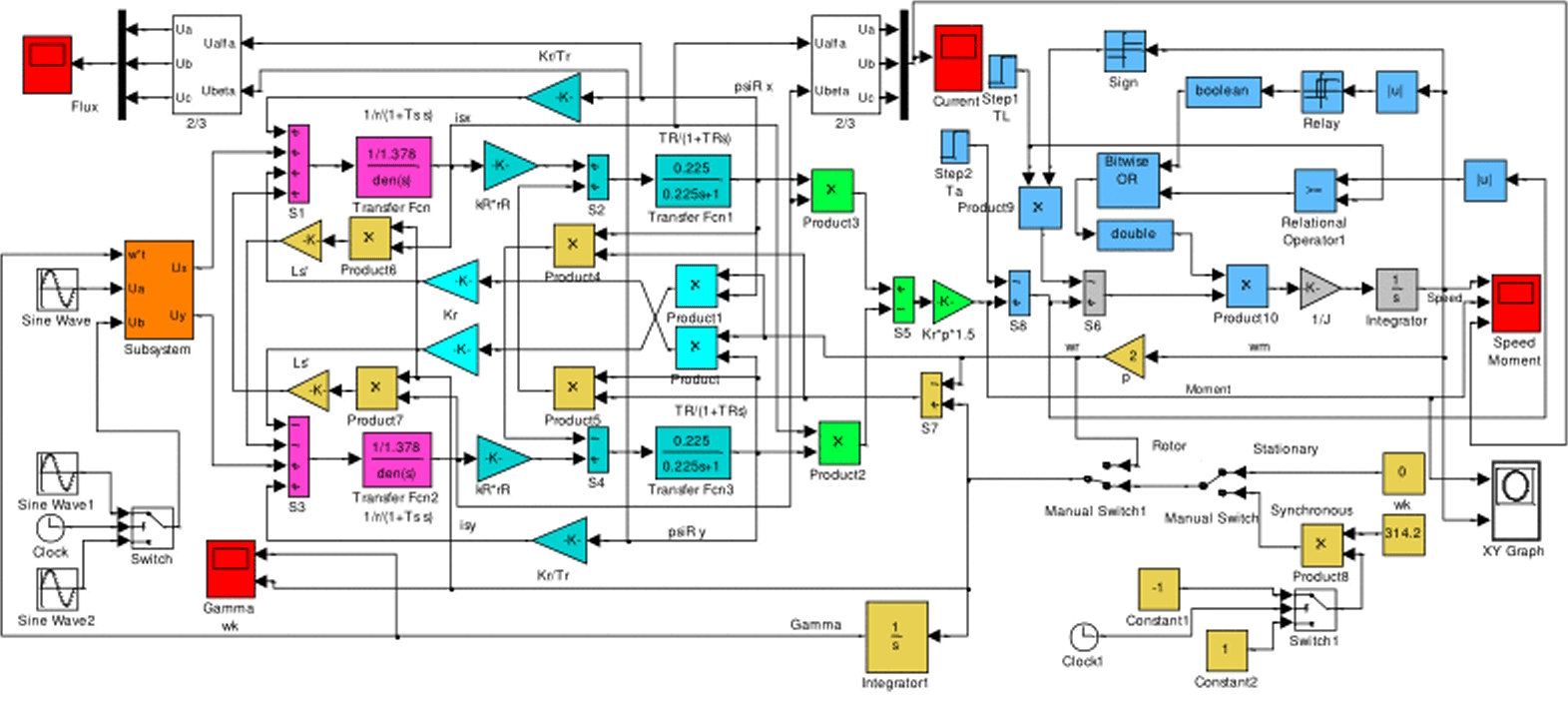
Рис. 1.76. Структура модели асинхронного двигателя в абсолютных единицах (Fig1 76)
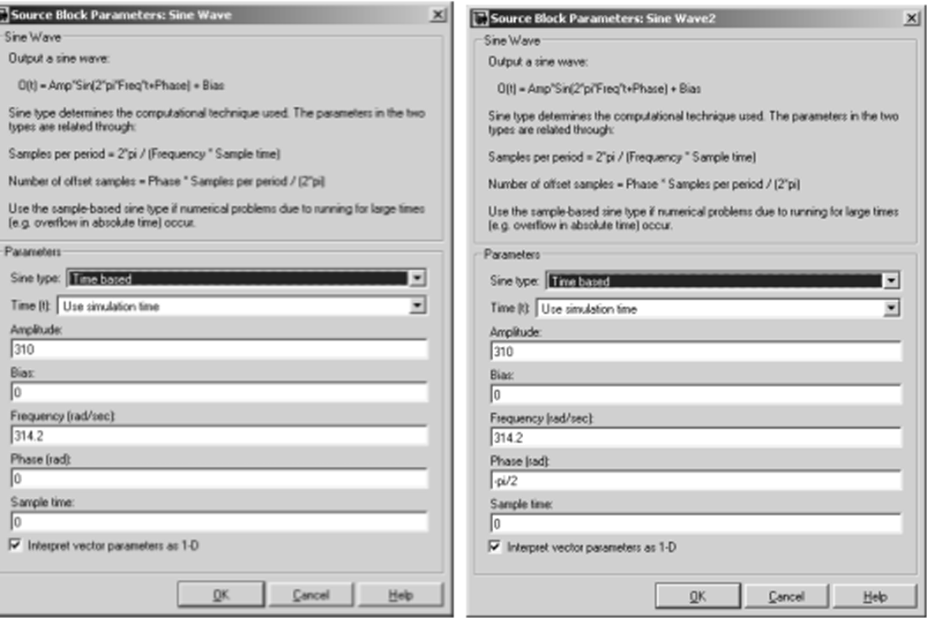
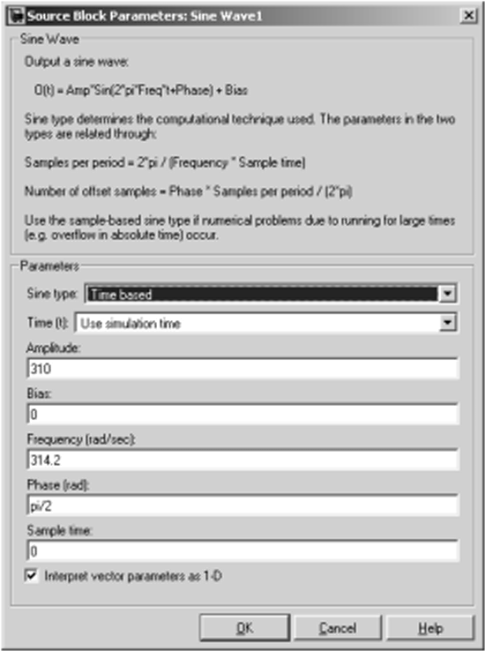
Рис. I.77. Диалоговые окна ввода сетевых напряжений
Параметры двухфазного напряжения, подаваемого на эквивалентный двухфазный двигатель, показаны на рис. 1.77.
Выполним моделирование пуска и реверса асинхронного двигателя при реактивном моменте нагрузки, равном номинальному значению. Для чего на вход TR модели двигателя подаётся сигнал от блока Stepl величиной 26,71 Нм.
Время моделирования принято 0,5 с, реверс при достижении времени 0,25 с.
Результаты моделирования показаны на рис. 1.78.
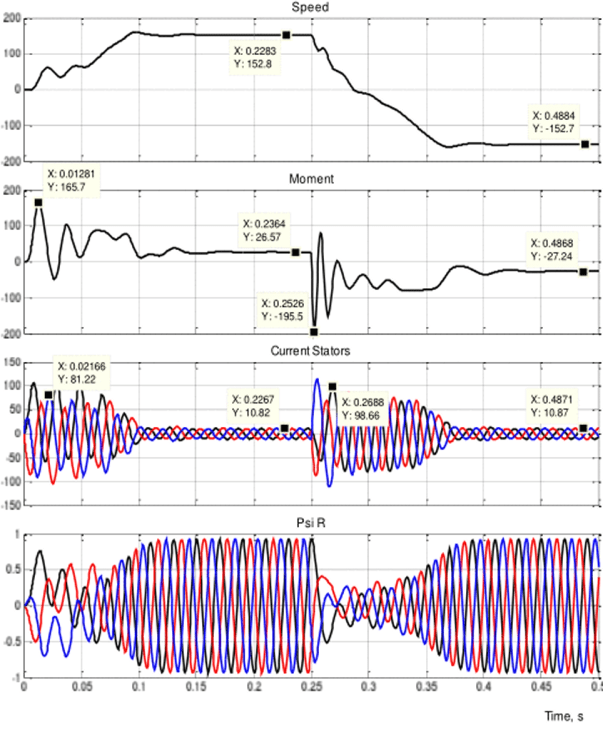
Рис. 1.78. Результаты работы разработанной модели асинхронного двигателя (моделирование пуска — реверса двигателя RAI12M4 с реактивной нагрузкой номинального значения)
Анализ двух расчётов: с модернизированной моделью SimPowerSystems (см. рис. 1.68) и с разработанной по математическому описанию (см. рис. 1.78) показывает их полное схождение, что позволяет утверждать о возможности использования разработанной модели в исследованиях электропривода переменного тока.
В п. 1.2.1 были рассмотрены теоретические основы построения преобразователей координат из неподвижной во вращающуюся систему и из вращающейся в неподвижную (см. файлы Fig246, Figl48).
При построении реальных систем электропривода переменного тока, как асинхронных, так и синхронных, практически всегда в систему управления включаются преобразователи координат (рис. 1.79). Это обусловлено тем, что реализация регуляторов возможна лишь во вращающейся системе координат, а реальные токи в обмотках статора — это токи в неподвижной системе координат. Поэтому, как правило, современные электроприводы переменного тока содержат преобразователи обоих типов (рис. 1.79).
Кроме того, структура электропривода переменного тока (рис. 1.79) содержит преобразователи фаз 2/3 и 3/2. Первые преобразовывают двухфазные параметры токов или напряжений в трёхфазные, а вторые преобразовывают трёхфазные токи и напряжения в двухфазные.
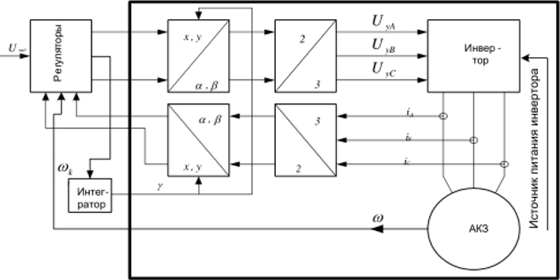
Рис. 1.79. Блок-схема электропривода переменного тока
В блоке регуляторов на основе задающего сигнала им0 и сигналов из каналов обратной связи по переменным состояния вырабатываются сигналы управления во вращающейся системе координат, а также скорость вращения системы координат (сок). Переключатель S находится в среднем положении и интегратор поворачивает координаты со скоростью сок. Затем выходные сигналы регуляторов переводятся в систему неподвижных координат, которые управляют инвертором. Сигнал обратной связи, но току статора, вырабатываемый в неподвижной системе координат, преобразуется во вращающуюся систему и только тогда он может быть подан на регуляторы.
Для примера рассмотрим результаты моделирования привода переменного тока, представленного в файле Figl76, для трёх возможных состояний координат: неподвижная cot =0, синхронная с частотой питающего напряжения (о>к =0)и) и вращающаяся вместе с электрической частотой вращения ротора (сок = сог).
Результаты моделирования показаны на рис. 1.80−1.82.
Так как электромагнитный момент двигателя является произведением выбранной пары векторов (см. выражения (1.35)), а произведение определяется значениями их модулей и углом между векторами, то момент не зависит от того, в какой системе координат векторы представлены [2, 3].
Данное положение подтверждается результатами моделирования в различных системах координат, представленными на рис. 1.80−1.82.
Момент двигателя и частота вращения ротора на указанных рисунках имеют одинаковый вид, совпадают по качественным и количественным признакам, так как моделирование выполнено для двигателя RA112M4, работающего с реактивной нагрузкой номинального значения.
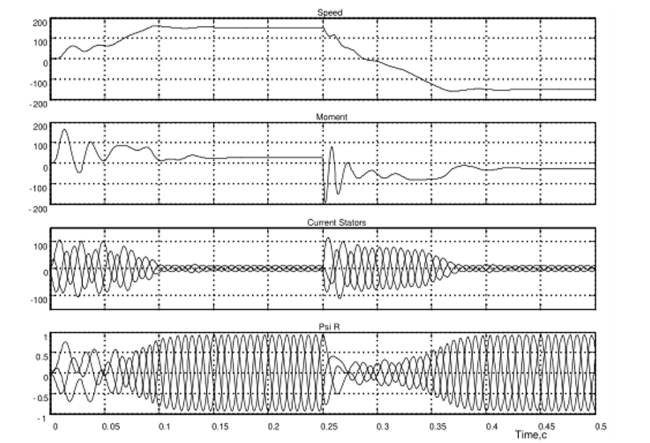
Рис. 1.80. Неподвижная система координат cot=0.
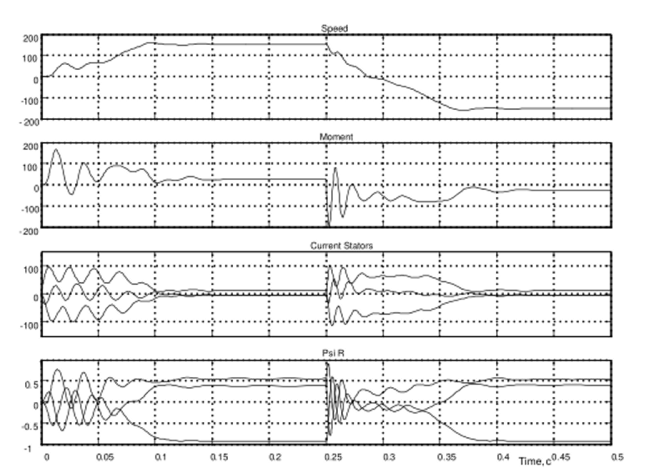
Рис. 1.81. Синхронная система координат (0)к = С0(), координаты вращаются с частотой напряжения на двигателе.
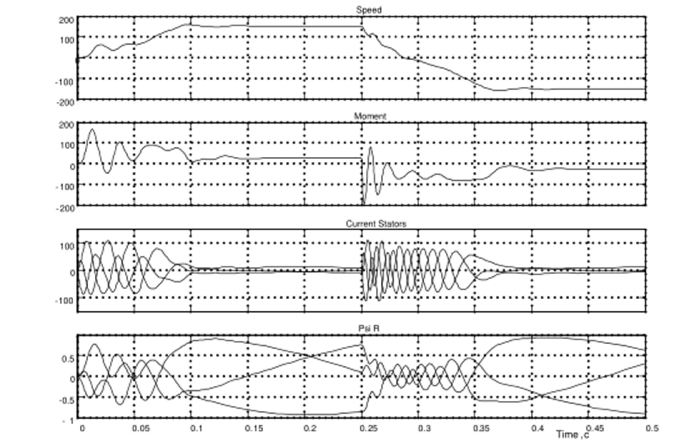
Рис. I. S2. Координаты вращаются с электрической частотой вращения ротора (СОк = й)г).
Доступные для измерения такие переменные параметры двигателя, как ток обмотки статора и потокосцсплснис ротора имеют различные представления в выбранных системах координат, что наглядно видно на рис. 1.80−1.82.
В заключение следует отмстить, что заявленные возможности моделирования асинхронной машины в SimPowerSystems в различных системах координат на практике не нашли подтверждения. Данное ограничение может оказаться серьёзным тормозом на пути реализации моделей приводов по структуре, показанной на рис. 1.79.